
What's New
View new features for MotionSolve 2025.1.
Altair Multibody Solutions 2025.1 Release Notes
New Features
- Real-time Simulation Using Code Generation for Vehicle Models (MotionSolve)
- MotionSolve 2024 introduced real-time simulation for car models created
from the using a variable step integrator. The newly enhanced
MotionSolve real-time simulation now uses code generation, a superior
approach, and runs at a constant step and constant cost integrator.
- When Real-Time Compliant is selected, MotionSolve builds the FMU of the vehicle and solves it in real time.
- When Code generation is selected, the C code for the MotionSolve vehicle model, excluding the driver and tire, is generated. Use this code to compile and build an FMU, which can be used with any FMU-compatible software.
- The Car/Small Truck and Heavy Truck libraries, created by MotionView wizard, are supported in the Real-Time Compliant and Code generation options.
- Support for Generalized Damping for Flexible Bodies (MotionSolve)
- MotionSolve now supports generalized damping for flexible bodies exported from a CMS analysis. Specify the generalized damping using the GenDamp block in Reference_FlexData. In OptiStruct, PARAM,MBDDAMP,YES specifies the inclusion of the generalized damping matrix in the Flex h3d_file. If Body_Flexible contains both a GenDamp block and modal damping, the cumulative damping will be applied.
- Mass/Inertia Setup Event for Vehicle Models
- The Vehicle Tools Extension introduces a new event that can be used for achieving a model’s target mass and inertia properties. This event’s primary use is in vehicle models for achieving the required front axle/rear axle mass distribution by tuning the mass (and optionally, moment of inertias) of a specific body using an automated program.
- Visualization of Tire Deformation for Altair Fiala and Siemens Simcenter MF-Tyre/MF-Swift
- The Vehicle Tools Extension now includes the option to visualize tire
deformations for Altair Fiala and Simcenter MF-Tyre/MF-Swift. You can
turn on the toggle to view the tire deformations in a HyperView
animation. These deformations enhance the visual appeal of the
animations and provide an approximate estimate of contact patch
sizes.
Figure 1. Altair Fiala Tire Deformation in HyperView 
- User Spline Support for CSV/RPC/DAC Input Formats
- In MotionSolve, an in-built subroutine is now available and can be used
to read CSV, RPC/RSP, and DAC formats. This is implemented as a
SPLINE_READ user-subroutine and is used to create
a Reference_Spline element in the XML/Python solver
deck. You can use this subroutine to read 2D and/or 3D spline data into
your MotionSolve models. For 3D splines, only CSV formats are
supported.
Figure 2. 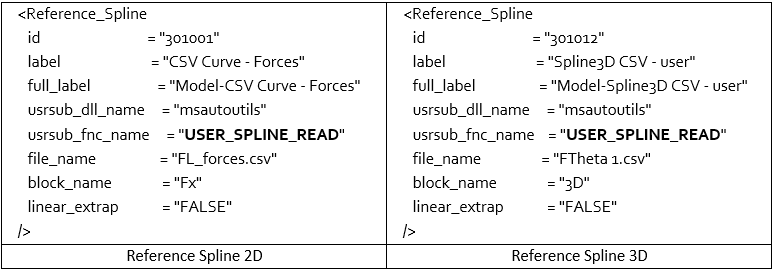
- Functional Mockup Unit 3.0 Export
- MotionView now supports exporting the model to the Functional Mockup Unit (FMU) version 3.0 format. An additional choice of the format is available in the Export dialog.
Enhancements
- MotionSolve Results in H3D, Version 24
- MotionSolve H3D results have been upgraded and will be written in H3D version 24, which can be read from HyperView 2024.1 or later.
- Static and Assembly Analysis
- MotionSolve automatically enables static_hold for a constant expression in an explicit control_diff during static/assembly to avoid convergence failure.
- MotionSolve Linear Analysis
- In MotionSolve, linear analysis has been improved for enhanced performance, which may lead to differences in the linear results.
- Edit Variable Names in Wizard Models
- It is now possible to change the variable names of entities in models built using the wizards. Caution is recommended, however, when changing the variable names, as it could affect tasks or events that might depend on entities whose variable names have been changed.
- Pre-evaluation of User-defined Templates
- The user-defined template now has a Boolean attribute called pre_evaluate. This option is useful during the model export when the template needs to be evaluated before other entities. This option is now available in the template’s Entity Editor, labeled as Evaluate early on export.
- Turn Off Static in Full Vehicle Driver Events
- The AltairDriver Events in the Vehicle Tools now contain an option to skip the static simulation that precedes the transient simulation. This option supports the vehicle models that do not achieve static equilibrium easily. A model may not achieve static equilibrium if it is on a road surface this is not flat, or if the model has residual forces at the beginning. Turn off the Run initial static option from the Driver Event's Entity Editor.
- Version Upgrade for Cosin FTire
- The Vehicle Tools Extension has upgraded the support for Cosin FTire to 2024-4. The new version is backward compatible with tire and road input files from previous versions.
- Version Upgrade for Simcenter MF-Swift/MF-Tyre
- The Vehicle Tools Extension has upgraded the support for Siemens Simcenter MF-Tyre/MF-Swift to v2412. The new version is backward compatible with tire and road input files from previous versions.
- nPost Event for Models Without Tires
- An n-Post event from the Vehicle Tools Extension can be now added to a model that does not have tires. In the early stages of the product development, when the model does not have fully detailed tire data and property files, the nPost event can be used to run a spindle-coupled analyses that can produce meaningful results.
- Anti-squat/dive, Motion-ratio, and CG Location Subroutines Using C++
- The subroutines that calculate the anti-squat/dive, motion-ratio, and CG location have been migrated to use a C++ DLL instead of a Python script. This provides some performance improvement and better compatibility with MotionSolve real time. Models that use the Python subroutines will continue to work in newer versions of MotionSolve.
- Expression Builder for File Data Members
- It is now possible to define parametric expressions for any field that takes a file name as input or output through the Entity Editor. Every file field has the option Build Expression, which gives access to the Expression Builder.
- Improvements to Pre-loading an NLFE Body
- Previously, to provide pre-loads to an NLFE, a Python script was needed to convert the preloaded state XML file to a CSV file. You then had to use the CSV file in the Positions and Gradients dialog of the NLFE Entity Editor. The conversion from XML to CSV is no longer necessary. You can now use the state XML file in the Positions and Gradients dialog. Also, pre-loading more than one NLFE body in a model is now supported using the same XML file.
Resolved Issues
- MotionView crashes while editing multiple compliant joints.
- Spline3D does not expand when selecting Use local file and function name.
- Respond if option does not get the correct value in sensors.
- MotionSolve license is not returned if you interrupt a live run in MotionView.
- Replacing an assembly crashes MotionView.
- In Frequency Response Analysis, you cannot assign number of steps > 10.
- MotionView, with the Vehicle Tools Extension, fails to load a standard include file in certain cases.
- FLX crashes HyperView on Linux when plotting Nodal Strain or Stress.
- For the Move tool, the Tool orient mode (orange handles) is not reset when using the Shift button 'UP'.
- MotionView crashes when trying to clear the existing session using the Ctrl+N keyboard shortcut.
- Reload error for a saved XML model when the Python, Compose, or Matlab scripts are not in the working directory.
- MRF not written during a forced assembly in a reloaded model with flexible bodies.
- Drum road models are not solving when exported as a Python deck.
- In Electronic Power Assisted Steering (EPAS), the torque sensor expression has an error.
- Scooter models with CVT, built using the Assembly Wizard, have errors.
- SDF reports are not created for models with rear-steered axles or with more than two axles.
- Input signal files from nPost models are missing in the archived folder.
Known Issues
The following known issues will be addressed in a future release:
- There are limited usability options and modified workflows compared to previous versions. Select the Run All Cells option to view the plots.
Altair Multibody Solutions 2025 Release Notes
Highlights
The 2025 release of Altair Multibody Solutions introduces several enhancements and
bug fixes to MotionView, MotionSolve, and their extensions. Here are some of the key
highlights:
- Save system definition to the Entity Browser (MotionView)
- Deformable curve on a Polybeam (MotionView)
- Improvements to Frequency Response Analysis (MotionSolve)
- CD Tire updates (MotionSolve/Vehicle Tools Extension)
New Features
- Save System Definition to the Entity Browser (MotionView)
- MotionView's Entity Browser contains a list of entities that can be
added to the model. It is now possible to save systems to the Entity
Browser for quick retrieval and reuse.
Figure 3. 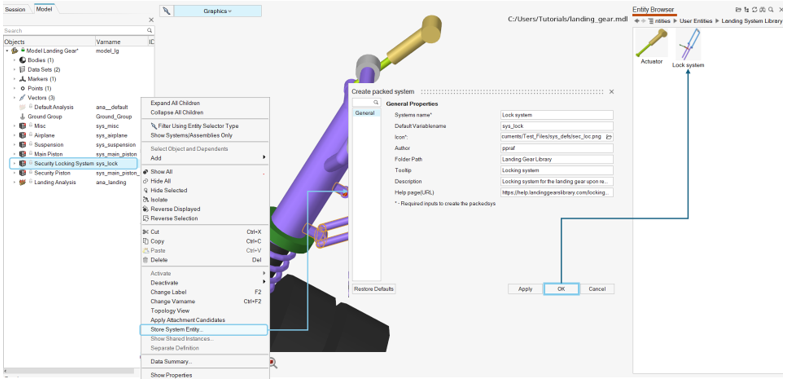
- Deformable Curve on Polybeam (MotionView)
- In the previous release, MotionView and MotionSolve added support for the deformable curve contact, which can be used to model pipes, cables, and tubes in contact. In this release, MotionView further enhances this functionality by providing an option to add a deformable curve with graphics when creating a polybeam entity. This improvement streamlines the setup of models with slender elements, enabling faster configuration.
-
Figure 4. 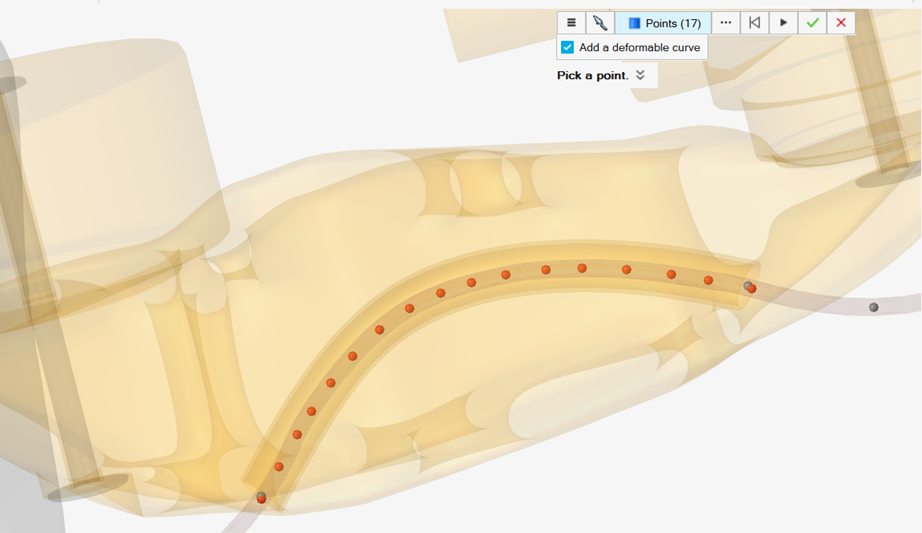
Figure 5. 
Enhancements
- Import Markers and Geometrical Curves from Catia (MotionView)
- The CAD import functionality has been enhanced to read any existing marker and geometrical curve from Catia V5.
- Improvements to Frequency Response Analysis (MotionSolve)
- In this release, the Frequency Response Analysis in MotionSolve
introduces additional support for flexible bodies:
- Frequency-dependent modal participation factors.
- Frequency-dependent kinetic energy, dissipative energy, and strain energy distribution.
- Frequency-dependent transfer path analysis.
- Write mkb Matrix in Linear Analysis (MotionSolve)
- In this release, MotionSolve includes support for exporting of the mass, stiffness, and damping matrices of a linearized system.
- Fraunhofer CD-Tire: Resizing (Vehicle Tools Extension)
- The Vehicle Tools Extension now supports the Resizing feature for CDTire from Fraunhofer ITWM. The resizing feature allows a tire model to be automatically resized based on reference and target tire and rim specifications.
- Fraunhofer CD-Tire: Support for MF++ (Vehicle Tools Extension)
- The Vehicle Tools Extension now supports the Fraunhofer MF++ tires. CDTire/MF++ is a temperature enhanced Magic Formula for coupling to CDTire/Thermal in advanced handling applications.
- Fraunhofer CD-Tire: Licensing Changes (MotionSolve)
- MotionSolve has updated the license check-out logic for CDTire and the CDTire resizing feature.
- Version Up for Siemens MF-Tyre/MF-Swift and Cosin FTire (Vehicle Tools Extension)
- The Vehicle Tools Extension has upgraded the support for Siemens MF-Tyre/MF-Swift to v2406 and Cosin FTire to 2024-3. These new versions are backward compatible with tire and road input files from previous versions.
- Motion-ratio Outputs for Car/Small Truck and Two-Wheeler Library Models (Vehicle Tools Extension)
- The Vehicle Tools Extension includes an inbuilt output for reporting motion-ratios of ride springs for the models that are built using the Car/Small truck and Two-wheeler libraries. The calculations are based on the spring displacements and the corresponding wheel center displacements. When you build the models using the libraries, these outputs will be created in dedicated Systems alongside the springs whose motion-ratios are measured.
- Added Contact Jacobian Computation Time to *.cof File (MotionSolve)
- When requested, MotionSolve outputs a *.cof file summarizing the contact simulation. For each contact, it provides contact details, including the time spent on contact evaluation. In this release, the *.cof file is further enhanced to include the computation time for the contact Jacobian as well.
- MODE and GETMOD Returns 35 for Assembly Analysis (MotionSolve)
- The solver functions MODE and GETMODE provide insight into the current analysis mode of the solver. Both functions have been enhanced so that MotionSolve now returns a value of 35 during Assembly analysis, allowing for clearer differentiation between Assembly and Static analysis modes.
Resolved Issues
- Run time error is encountered after activating joint compliance.
- The dialog goes behind the Leaf Spring Builder tool in Linux.
- Output on Entity Sets within a system results in requests for all entities in the model.
- Constraint Mate is not supported with msolve Python.
- The Advanced Selection dialog cannot be invoked from collectors within the FrequencyInput Property Editor.
- Adding a Bushing attachment to a system results in an application error.
- The application crashes when solver variables are added to solver arrays in Linux.
- Entities lose their labels in the Model Browser after undoing the paste action in a system.
- Creating a second Belt pulley system (Substructured flexbodies) takes too long.
- mdl_batch exports an incomplete model from the Vehicle Tools in Linux.
- A force created on a marker has a missing reference after creation.
- The topology view on systems is unreadable when it contains a non-connected entity.
- FMU exported from MotionView is not readable in HyperStudy.
- Y and Z axes in Spline 3D are swapped in the display.
- Zero crossing sensor hmax related to contact is always written despite its selection.
- Updated file paths in FMU parameters are not updated in the exported XML.
- The Contact Force plot is missing in the default Contact report.
- Opening two optimization models consecutively crashes MotionView.
- Datasets with the same variable name have the values synchronized.
- Initial Conditions on systems input through the Entity Editor are not applied to the model.
- Numerical Jacobian calculation for flexible body.
- Functions QDOT and QDDOT must use an actual mode number instead of an index.
- Crash when writing the load set file when the flexible body is not used in any contact.
- Differences in EDEM co-simulation results: Difference between starting the coupling server in Creator Mode and Simulator Mode.
- edem.fmu randomly fails to load during the simulation start.
- Model with UserGra causes CNAME to display on all requests in the ABF file.
- mspost now displays the correct progress during ABF export.
- MotionSolve continues saving the XML even if the savesub failed.
- MotionSolve supports both label and comment for post_request in XML.
- MotionSolve writes only the converged results at the start time of a kinematic analysis to MRF.
- Models with softsoil road graphics created using RoadTools in v2024.0 and v2024.1 are failing.
- CDTire models fail when only one license for CDTire Resizing is available.Note: The licensing logic has been changed. Please see Enhancements for more details.
- Anti-dive calculations do not report correct values.
- Models with CDTire and FTire crash the solver if the initial static is not included.
- Two-wheeler models with a leaning driver fail after traveling a certain distance for specific event parameters, especially in a Constant radius cornering event.