The stiffness of the spring can be defined multiple ways with each degree of freedom
defined differently.
Force and Moment
Linear Stiffness and Damping Behavior
The simplest formulation is a linear elastic spring stiffness, where the internal
force is proportional to the relative displacement. In this case, only the constant
stiffness parameter and optional damping parameter are entered.
For linear stiffness, the force and moment are:
For linear dashpot, the force and moment are:
For linear stiffness and dashpot, the force and moment are:
Nonlinear Behavior
The force and moment in a spring is computed as:
Where, is the translational degrees of freedom: 1,2,3
Where, is the rotational degrees of freedom: 4,5,6
The variables in the force and moment equation represent:
Spring force versus displacement function input as
fct_ID1i
Spring force versus rotation function input as
fct_ID1i.
Scaling coefficients
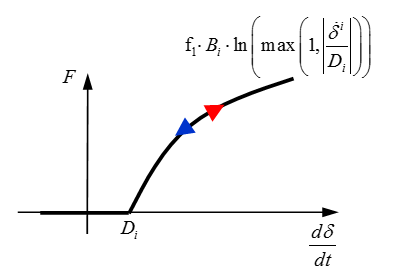
Logarithmic function that scales the spring
stiffness as the velocity increasesFigure 1. With Parameter Input
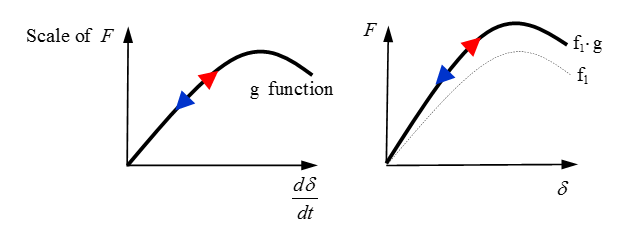
Scale the stiffness as a function of linear input as
fct_ID2i
Scale the moment as a function of rotational
velocity input as fct_ID2i
This input can be used to model nonlinear strain rate effects of the spring
stiffness.Figure 2. With g Function Input
Linear damping coefficient used to increase the
spring stiffness as a function of velocity
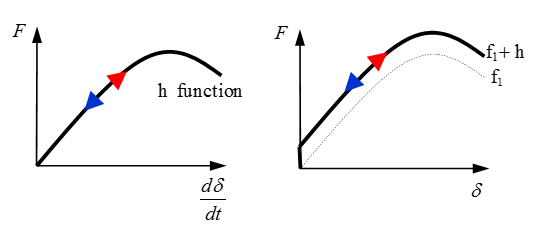
or Nonlinear damping function input as
fct_ID4i
Linear or nonlinear damping as a function of velocity can also be added to the spring
force using either a linear damping coefficient or a user-defined function.Figure 3. With Function Input
The functions and both describe the damping behavior of the spring.
However, the function scales the spring stiffness function , but the function adds to the spring stiffness function .
Time Step
Time step for spring:
Time step for dashpot:
Time step for spring and dashpot:
Where,
Mass of the spring
Linear stiffness or for a nonlinear spring
Linear damping or for nonlinear damping
For nonlinear springs, is used for time step calculation and contact
stiffness. If is not defined in the spring property, the maximum
slope of fct_ID1i () will then automatically be used to calculate the
timestep. The behavior is the same for damping stiffness .