
关联副
关联副实体定义了两个或三个铰接自由度之间的代数关系。
此约束单元可用于建模理想化的正齿轮、齿轮齿条和差速器,作为关联一组铰接中位移的简单约束。关联副只能用于指定平移、旋转和圆柱铰接之间的关系。
添加关联副
-
在“运动”功能区的“配置文件”下,选择 Analyst。

-
在“连接”下,选择关联副工具。如果关联副不可见,请使用铰接工具下的
 下拉菜单。
下拉菜单。
提示: 要查找并打开工具,按 Ctrl+F。更多信息,请见查找和搜索工具。此时会打开操作面板。图 1. 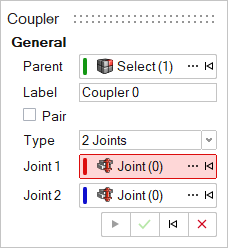
- 可选: 要选择父系统,请点击高级选择器 ...。
- 可选: 编辑标签。
- 可选:
选择创建对复选框,创建一个成对实体。
关联副实体与 Inspire 中创建的大多数实体一样,可以是单个实体,也可以是成对实体。成对实体有助于创建关于模型 Z-X 平面对称的模型。它们的属性也可以围绕 Z-X 平面对称(换句话说,Y 属性是镜像的)。在编辑创建的关联副时,可以决定或指定关联副的不对称性或对称性。
-
选择要约束的铰接数量。
- 2 个铰接
或者
- 3 个铰接
- 2 个铰接
-
选择第一个铰接参考(铰接 1)。
- 在模型视窗中选择一个铰接。
或者
- 在操作面板上,点击高级选择器 ... 并在模型树中进行选择。
注: 定义成对关联副时,使用成对实体来表示铰接 1、铰接 2,以此类推。 - 在模型视窗中选择一个铰接。
-
选择第二个铰接参考(铰接 2)。
- 在模型视窗中选择一个铰接。
或者
- 在操作面板上,点击高级选择器 ... 并在模型树中进行选择。
- 在模型视窗中选择一个铰接。
-
如果要约束的铰接数为 3,则选择第三个铰接参考(铰接 3)。
- 在模型视窗中选择一个铰接。
或者
- 在操作面板上,点击高级选择器 ... 并在模型树中进行选择。
- 在模型视窗中选择一个铰接。
- 可选:
点击
 重置实体选择并选择新实体。
重置实体选择并选择新实体。
-
鼠标右击划过勾选标记以退出,或双击鼠标右键。
关联副被添加到模型中后,相应的关联副就会自动显示在浏览器区域中。注: 默认情况下,Inspire 中实体的变量名会遵循一定的约定。例如,所有关联副实体的变量名都以 "Coupler_" 开头。这是在 Inspire 中创建模型时建议遵循的约定,因为它在模型编辑和模型操作方面有许多优势。
编辑关联副
- 选择关联副。
-
从以下方法中选择:
表 1. 编辑方法 要使用此方法 则 关联副工具 - 在“运动”功能区的“配置文件”下选择 "Analyst"。
- 在“连接”下,选择关联副工具。
- 此时显示操作面板。
- 要编辑参考,请按照添加关联副部分中的步骤操作。
属性编辑器 - 在视图菜单中选择属性编辑器。
- 在“运动”功能区的“配置文件”下选择 "Analyst"。
关联副属性
属性编辑器中关联副属性的描述。
| 属性名称 | 说明 | ||
|---|---|---|---|
| 常规 | |||
| 名称 | 实体名称 | ||
| 变量名称 | 变量名,实体的唯一标识符字符串 | ||
| ID | 一个唯一的标识性整数 | ||
| 类型 | 定义需要约束的铰接数量 | ||
| 铰接 1 | 选择第一个铰接 | ||
| 铰接 1 耦合轴 | 定义要控制的位移类型,并自动指定。如果是圆柱铰接,则应手动选择位移类型(平移或旋转)。 | ||
| 铰接 2 | 选择第二个铰接 | ||
| 铰接 2 耦合轴 | 定义要控制的位移类型,并自动指定。如果是圆柱铰接,则应手动选择位移类型(平移或旋转)。 | ||
| 铰接 3 | 选择第三个铰接 只有当类型为 3 时才可用。 |
||
| 铰接 3 耦合轴 | 定义要控制的位移类型,并自动指定。如果是圆柱铰接,则应手动选择位移类型(平移或旋转)。只有当类型为 3 时才可用。 | ||
| 使用虚拟 | 虚拟是一种与刚性铰接非常相似的专业选项,但具有“软约束”行为,对于避免冗余铰接很有用。默认使用“运行运动分析”窗口的全局设置。 | ||
| 对称 |
|
||
| 属性 | |||
| 比率 | 第一和第二个铰接之间的位移比 | ||
| 比率 2 | 第二和第三铰接之间的位移比 只有当类型为 3 时才可用。 |
||
| 信号 | |||
| 用户自定义 | 选择该复选框可使用用户子程序指定关联副的属性。 | ||
| 用户表达式 | 用 USER 求解器函数定义的表达式,参数传递给用户子程序 | ||
| 使用本地文件和函数名称 | 为子程序提供本地文件和函数,否则求解器将在用户子程序搜索路径中搜索该函数。 | ||
| 本地文件 | 根据函数类型为子程序选择文件。 | ||
| 函数类型 | 选择文件类型 DLL、Python、MATLAB 或 Compose |
||
| 函数名称 | 子程序文件中需要调用的函数名称。 | ||