
Primitives
A primitive is a simple geometric shape defined using hard points and vectors. Examples include a box, cylinder, or sphere.
It can be defined as a pair entity, which helps in creating models that have identical entities across the x-z plane. The pair entity can have asymmetric or symmetric properties. When symmetric, the properties from one side are mirrored to the other side about the x-z plane.
Add a Primitive
Create a primitive using a hard point as the origin and, when applicable, using one or more hard points or a vector to define the orientation.
-
On the Motion ribbon, under Profile, select Analyst.

-
Under Create, select the Primitives tool.

Tip: To find and open a tool, press Ctrl+F. For more information, see Find and Search for Tools.The guide panel is displayed.Figure 1. 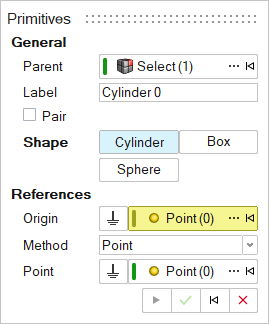
- Optional:
To select a Parent system, click the Advanced selector
....
Note: If a system or an entity in a system is selected before entering an entity context, the system is preselected as the parent.
- Optional: Edit the Label.
- Optional:
To create a pair of entities, turn on Pair.
- To create a model that is symmetric about the x-z plane, in the Property Editor, under General, set Symmetry to Left or Right.
- To create a model that is asymmetric, set Symmetry to None.
-
Choose a Shape:
- Cylinder
- Box
- Sphere
-
Resolve the References:
For a Cylinder:
- Select an Origin, which is one end of the
cylinder, using one of the following methods.
- In the modeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
 .
.
- Define the Alignment to orient the cylinder along its length.
Table 1. To use this Alignment method Do this Point Do one of the following: - In the modeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
Vector Do one of the following: - In the modeling window, select an existing vector.
- Select an edge or circular face of a geometry. A vector is created along the edge or center of the face. A hard point is also created for the vector origin.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
For a Box:
- Select a Type.
- Center: The origin of the box's coordinate system origin is at the center.
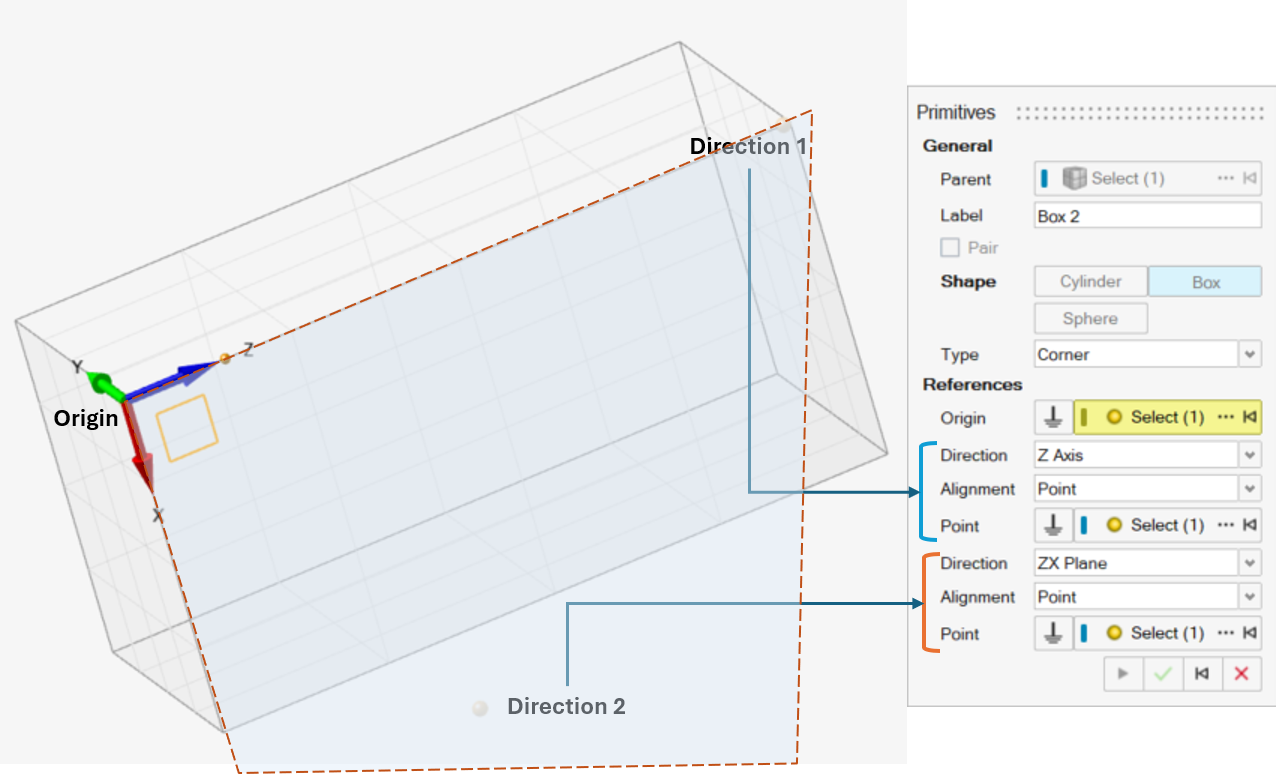
- Corner: The origin of the box's coordinate system origin is at a corner.
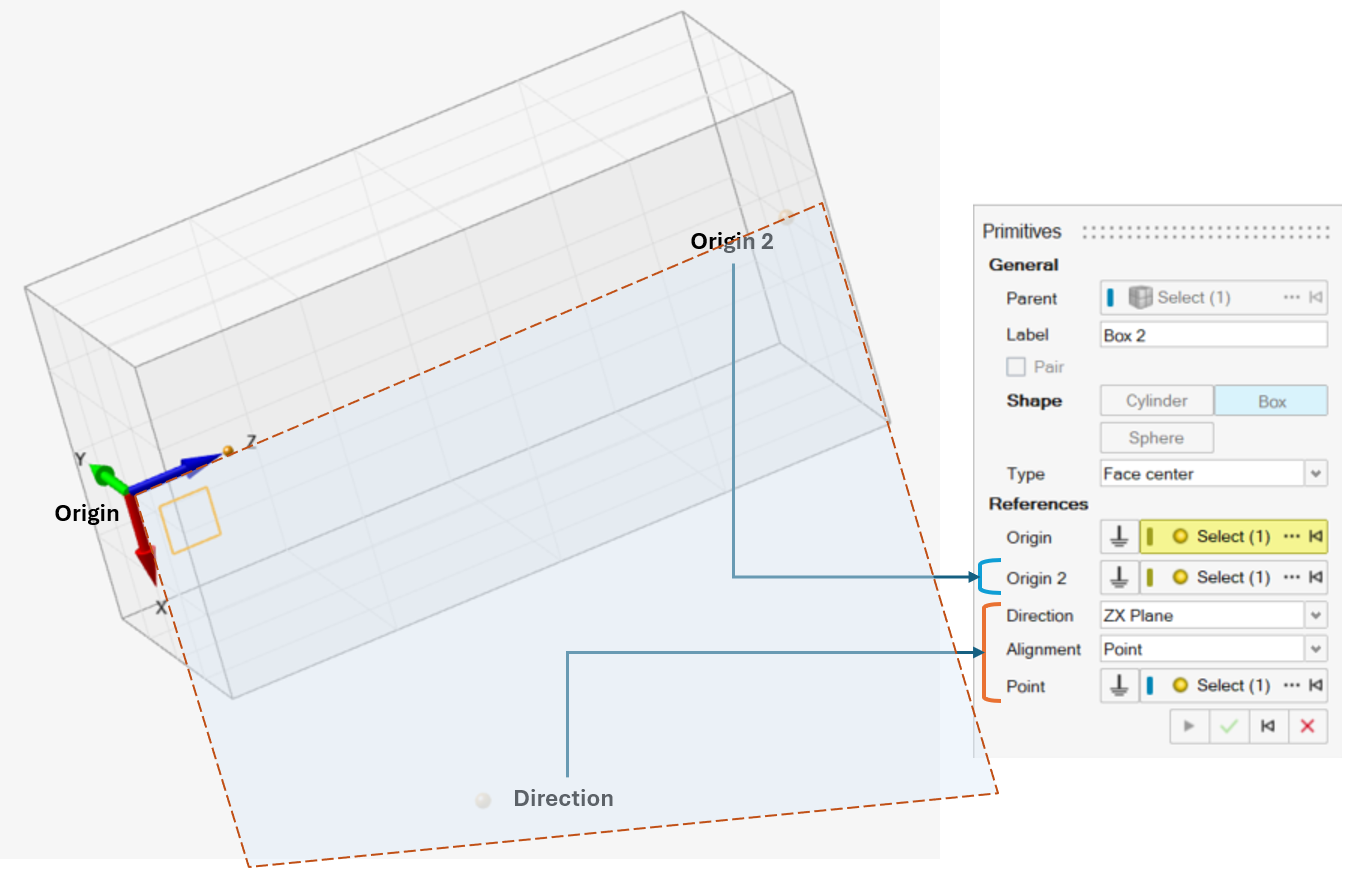
- Face Center: The box is defined using 2 points that form one set of opposite faces.
- Select an Origin using one of the following
methods.
- In the modeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
- Select the directions.
For Center and Corner:
- To orient the box, select a
Direction:
- X Axis
- Y Axis
- Z Axis
- Define the Alignment.
To use this Alignment method Do this Point Do one of the following: - In the modeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
Vector Do one of the following: - In the modeling window, select an existing vector.
- Select an edge or circular face of a geometry. A vector is created along the edge or center of the face. A hard point is also created for the vector origin.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
- Select another Direction. Based on the first direction, select one plane among the two listed. For example, if the Z axis was selected earlier, then ZX Plane and ZY Plane can be selected.
- Define the Alignment.
To use this Alignment method Do this Point Do one of the following: - In the modeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
Vector Do one of the following: - In the modeling window, select an existing vector.
- Select an edge or circular face of a geometry. A vector is created along the edge or center of the face. A hard point is also created for the vector origin.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
Table 2. Center and Corner Boxes 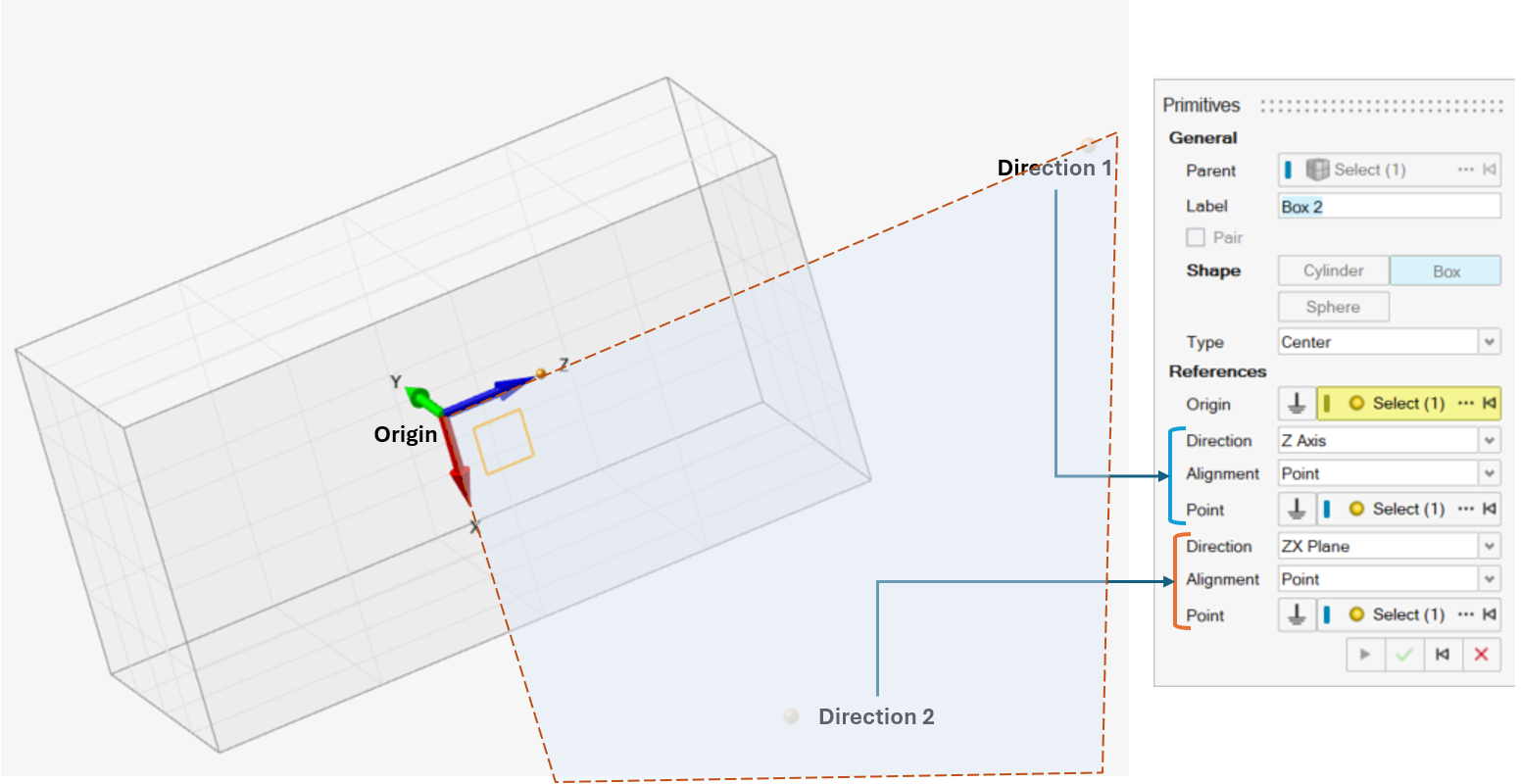
- To orient the box, select a
Direction:
For Face Center:- Select Origin 2 using one of the following
methods.
- In the modeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and
make your selection in the Model Tree.
This is sets the Z axis of the coordinate system along the selected point, with length in Z direction being the distance between Origin and this point.
- Select the other direction by selecting either ZX Plane or ZY Plane
- Define the Alignment.
To use this Alignment method Do this Point Do one of the following: - In the modeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
Vector Do one of the following: - In the modeling window, select an existing vector.
- Select an edge or circular face of a geometry. A vector is created along the edge or center of the face. A hard point is also created for the vector origin.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click
Ground
.
 For a Sphere, select an Origin, which is the center of the sphere, using one of the following methods.
For a Sphere, select an Origin, which is the center of the sphere, using one of the following methods.- In themodeling window, select an existing hard point.
- Select a vertex, edge, or face of a geometry. This will automatically create a new hard point. When an edge or face is selected, the point is created at the center of the edge or face.
- Click the Advanced Selector … and make your selection in the Model Tree.
- To select the global origin, click Ground
.
- Select an Origin, which is one end of the
cylinder, using one of the following methods.
-
Click Apply
 to create the entity and edit it further. For more information, see Edit a Primitive, or click OK
to create the entity and edit it further. For more information, see Edit a Primitive, or click OK
 to exit the tool on entity creation.
to exit the tool on entity creation.
The primitive entity is created. It is now listed in the Model Browser and its properties appear in the Property Editor.
- Right-click and mouse through the check mark to exit, or double-right-click.
Edit a Primitive
Edit a primitive part using the Primitives tool or Property Editor.
- Select the primitive.
-
Choose from the following methods:
Table 3. To use this method Do this Primitives tool - On the Motion ribbon, under Profile, select
Analyst.
- Under Create, select the
Primitives tool.The guide panel is displayed. Manipulators appear around the primitive.
Figure 2.
Example: The Cylinder primitive appears as shown below in Edit mode.Figure 3. 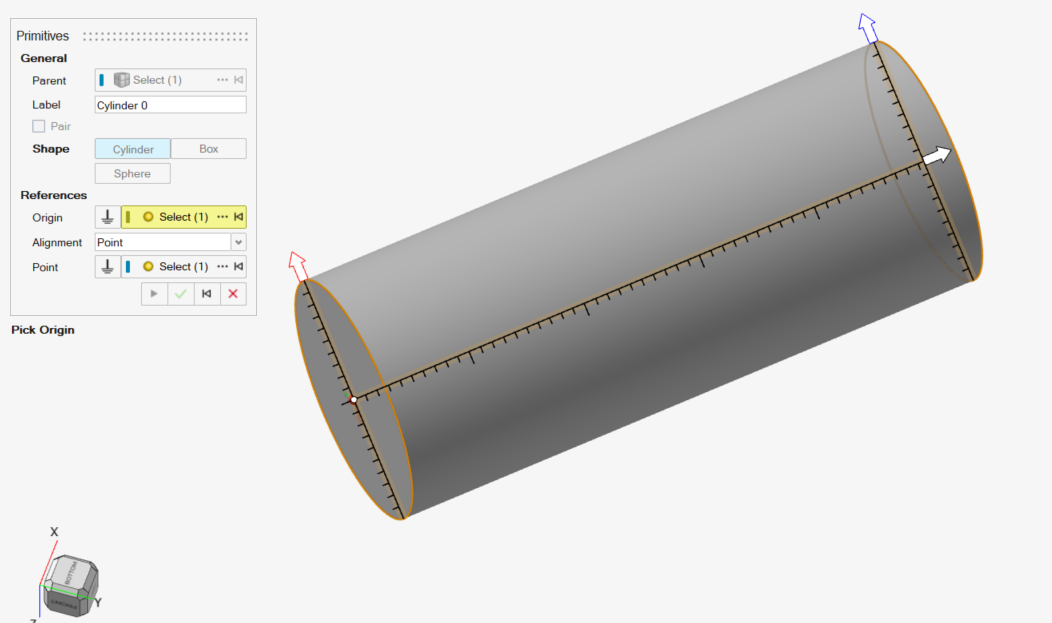
- Edit the Label or any References from the guide panel. Follow instructions in Add a Primitive for selecting References.
- Drag the manipulators to edit dimensions such as the Radius or Length.
- Right-click and mouse through the check mark to exit, or double-right-click. Or click
Cancel
 in the
guide panel.
in the
guide panel.
Property Editor The selected primitive's properties are listed in the Property Editor. Refer to Primitive Properties. - On the Motion ribbon, under Profile, select
Analyst.
Primitive Properties
Descriptions of primitive properties in the Property Editor.
| Property | Description |
|---|---|
| General | |
| Name | The entity's name |
| Variable Name | The variable name, a unique identifier string of the entity |
| ID | A unique identifying integer |
| Ground | Ground the part. |
| Rigid Group | Read-only. The rigid group name, if the primitive is part of a rigid group. |
| Material | Assign a material to the primitive. |
| Appearance | |
| Color | Assign a color to the primitive. |
| Transparency | Set the transparency level for displaying parts from 0 to 100%. |
| Geometric Properties | |
| Cylinder | |
| Origin | The center of one of the cylinder's bases. |
| Align Method | The length of the cylinder can be assigned to a
reference geometry:
|
| Point (Alignment) | Point indicating the orientation. Active only if the Align Method is Point. |
| Vector (Alignment) | Vector indicating the orientation. Active only if the Align Method is Vector. |
| Autolength | Set the cylinder length as the distance between the Origin and the Alignment Point. Applicable when the Align Method is Point. |
| Length | The cylinder's length. Applicable when the Align method is Vector and Autolength is turned off. |
| Radius 1 | The radius of the cylinder base containing the origin. |
| Radius 2 | The radius of the opposite cylinder base, which doesn't contain the origin. By default, the value is 1. |
| Box | |
| Origin | The box's origin. |
| Type | The box type:
|
| Direction (1) | First directional axis to orient:
|
| Method 1 | Method of orienting direction. Point or Vector. (Only applicable to Center and Corner boxes.) |
| Point 1 | Active only if Method 1 is Point. Point indicating the direction of the selected axis from the Origin. (Only applicable to Center and Corner boxes.) |
| Vector 1 | Active only if Align Method 1 is Vector. Vector indicating the direction of the selected axis from the origin. (Only applicable to Center and Corner boxes.) |
| Direction (2) | Plane to orient based on the Direction 1 selection. XY | XZ | YX | YZ | ZX| ZY. For a Face Center box, only ZX | ZY planes are available. |
| Method 2 | Method of orienting the plane. Point or Vector. |
| Point 2 | Active only if Align Method 2 is Point. Point indicating direction of the plane such that the selected point lies in the plane. |
| Vector 2 | Active only if the Align Method is Vector. Vector indicating the direction of the plane such that the selected vector lies in the plane. |
| Origin 2 | Applicable to Face Center. Indicates the point on the opposing face from the origin. The z-axis of the box system is oriented in along this point. |
| Length X | The length in the X direction |
| Length Y | The length in the Y direction |
| Length Z | The length in the Z direction |
| Sphere | |
| Origin | The origin of the sphere |
| Radius | The radius of the sphere |
| Mass Properties | Read-only when Override is turned off. |
| Override | Override the auto-calculated mass, inertia, and center of mass based on the geometry and assigned material. |
| Mass | Mass of the primitive |
| Ixx | Moment of inertia about the x-axis |
| Iyy | Moment of inertia about y-axis |
| Izz | Moment of inertia about z-axis |
| Ixy | Product inertia about the XY plane |
| Ixz | Product inertia about the XZ plane |
| Iyz | Product inertia about the YZ plane |
|
Note: The mass moment of inertia values are
provided with respect to the Center of Mass coordinate
system.
|
|
| Center of Mass | Center of Mass coordinate system (CM Marker) information |
| Override | Available when Override under Mass Properties is turned on. Turn this option on to select a different origin and orientation for CM marker. When this option is off, the CM marker is at Global Frame. |
| Coordinates | Read-only and available only when the Mass Properties Override option is off. |
| X | X coordinate of center of mass |
| Y | Y coordinate of center of mass |
| Z | Z coordinate of center of mass |
| Point | Available only if Override is turned on. Origin point of the CM marker. |
| Orientation | Read-only when the Mass Properties Override option is turned off |
| Orientation Method | Method of orienting the center of mass coordinate
system:
|
| 1st Axis | First directional axis to orient the CM Marker |
| Direction | Select X Axis, Y Axis, or Z Axis. |
| Alignment Method | Method of orienting direction. Point, Vector, or DxDyDz (Direction Cosines) |
| Point | Active only if the Alignment Method is Point. Point indicating the direction of the selected axis from the Origin. |
| Vector | Active only if the Alignment Method is Vector. Vector indicating the direction of the selected axis from the origin. |
| Dx | Active only if the Alignment Method is DxDyDz. Direction Cosine value in Global X direction |
| Dy | Active only if the Alignment Method is DxDyDz. Direction Cosine value in Global Y direction |
| Dz | Active only if the Alignment Method is DxDyDz. Direction Cosine value in Global Z direction |
| 2nd Axis | Second directional axis to orient the CM Marker. |
| Direction | Plane to orient based on the Direction of 1st Axis selection. XY | XZ | YX | YZ | ZX| ZY. For a Face Center box, only ZX | ZY plane are available. |
| Alignment Method | Method of orienting direction. Point, Vector, or DxDyDz (Direction Cosines) |
| Point | Active only if the Alignment Method is Point. Point indicating direction of the plane such that the selected point lies in the plane. |
| Vector | Active only if the Alignment Method is Vector. Vector indicating direction of the plane such that the selected vector lies in the plane. |
| Dx | Active only if the Alignment Method is DxDyDz. Direction Cosine value in Global X direction |
| Dy | Active only if the Alignment Method is DxDyDz. Direction Cosine value in Global Y direction |
| Dz | Active only if the Alignment Method is DxDyDz. Direction Cosine value in Global Z direction |
|
Note: When orienting the plane using DxDyDz, the
plane is oriented such that the resulting vector of Dx, Dy and Dz
lies in the plane.
|
|
| Initial Conditions | Set initial velocity conditions for the primitive. |
| Translational Velocity | Set initial velocity conditions for the primitive along the translational direction. |
| User-defined VM | Turn on this option to provide a reference marker for translational velocities. When this option is off, the reference marker is Global Frame. |
| Marker | Reference frame for translation velocities |
| Vx | Flag to specify the initial velocity along X |
| Vx | Initial velocity value along X |
| Vy | Flag to specify the initial velocity along Y |
| Vy | Initial velocity value along Y |
| Vz | Flag to specify initial velocity along Z |
| Vz | Initial velocity value along Z |
| Rotational Velocity | Set the initial velocity conditions for the primitive about the rotational direction. |
| User-defined VM | Turn on this option to provide a reference marker for rotational velocities. When this option is off, the reference marker is the part's CM marker. |
| Wm | Reference frame for rotational velocities |
| Wx | Flag to specify initial velocity about X |
| Wx | Initial velocity value about X |
| Wy | Flag to specify initial velocity about Y |
| Wy | Initial velocity value about Y |
| Wz | Flag to specify the initial velocity about Z |
| Wz | Initial velocity value about Z |
| Motion Contact | |
| Flip material side | Flip the side of contact. |
| Autocalculate resolution | Use the default resolution for tessellation when used in Motion contact (Medium). |
| Resolution | When Autocalculate resolution is turned off, choose a resolution from Very Low to Very High. |