
アンチスクワットとアンチダイブ
車両が加速すると、荷重は後方に移動するため、リアサスペンションに対する荷重が増大します。この結果として、リアスプリングが圧縮され、車両の後部が沈み込みます(スクワット)。ブレーキをかけたときは、荷重は逆に前方に移動するため、車両が前方から沈み込みます(ダイブ)。車体後部が過度に沈み込むと、車両の全体的なダイナミクスに対して不安定な影響が生じる可能性があります。この影響を軽減するために、‘アンチ’特性を組み込んでサスペンションジオメトリを設計することで、スプリングの圧縮を低減できます。このような設計はアンチスクワットジオメトリと呼ばれます。同様に、アンチダイブジオメトリは、ブレーキ適用時の車体前部のスプリングの圧縮を低減するのに役立ちます。
アンチスクワットの計算
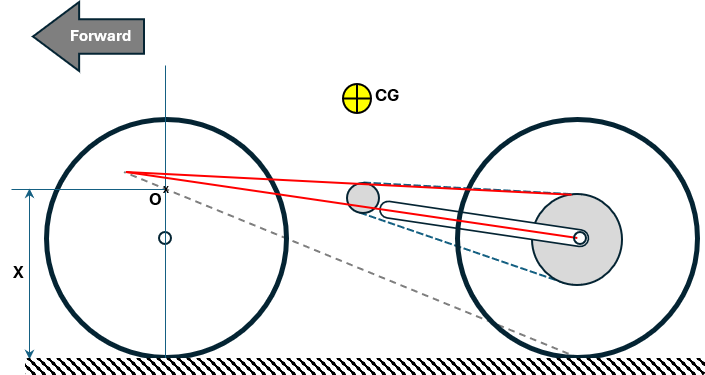
サスペンションのアンチスクワットは、スイングアーム、チェーンラン上部、車両CG高さ、タイヤ接触パッチを使用して計算されます。
リアホイール中心からスイングアームピボットを通過する線と、チェーンラン上部に沿って引かれたもう1本の線を想像してください。これら2本の線は、スイングアームピボットの前方にあるどこかのポイントで交差します。この交差ポイントとリアタイヤの接触ポイントを3本目の線で結びます。フロントタイヤの接触ポイントから垂直線を引き、この3本目の線と交差するポイントを”O”とします。この”O”の高さをCG高さのパーセンテージとして表したものが、アンチスクワット値です。
アンチダイブの計算
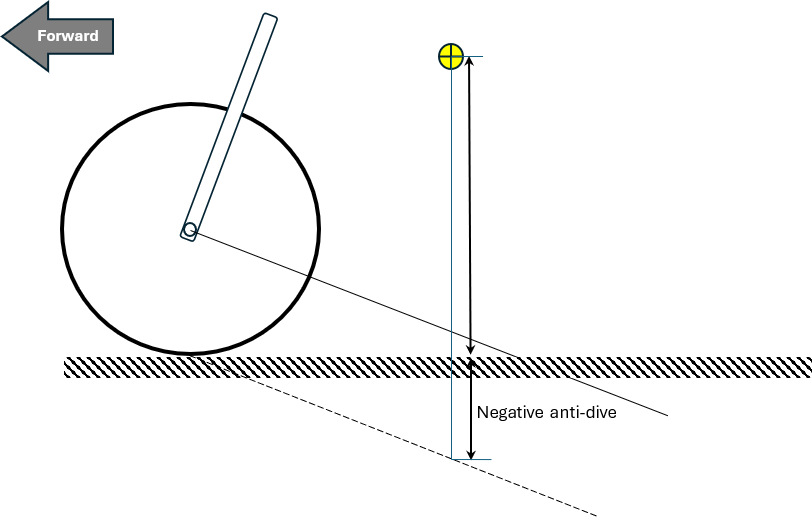
テレスコピックフォークは、この傾斜角に対して垂直な方向に伸びている無限長のスイングアームのように機能します。ホイール中心から引かれたこのような線を想像してください。これに平行なもう1本の線をタイヤの接触ポイントから引き、1本目の線と交差させます。車両のCGから下に向かって垂直線を引き、仮想スイングアームとタイヤの接触ポイントから引かれた線の両方と交差させます。
この線の地面 / 路面より下の部分をCG高さのパーセンテージとして表したものが、アンチダイブです。これは路面より下にあるため、このケースでは値は負になります。
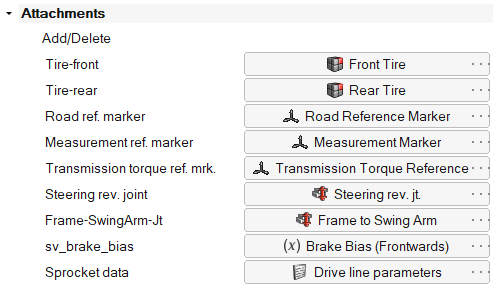
二輪車モデルのアンチスクワット / アンチダイブの出力要求
| SolverVariable | 目的 | 関数 |
|---|---|---|
| CG Height | 全体的な車両CG高さを測定する | USER(100, 2, {m_road_ref.idstring}) 引数: #1:ブランチID。デフォルト = 100。 #2:報告するCG座標。デフォルト = 2(Z軸)。 #3:報告する参照フレーム。デフォルト = 路面参照マーカー。 関数: GET_CG_LOC |
| Caster | フォークのキャスター角を測定する | USER(100, {steering_rj.i.idstring},
{m_measure_ref.idstring}) 引数: #1:ブランチID。デフォルト = 100。 #2:ステアリング回転ジョイントのマーカーID。 #3:報告する参照フレーム。デフォルト = 車両の参照フレーム。 関数: GET_CASTER |
| Wheel base | 車両のホイールベースを測定する | USER(100,
{tire_frnt.att_wheel_orient_marker.idstring},
{tire_rear.att_wheel_orient_marker.idstring}) 引数: #1:ブランチID。デフォルト = 100。 #2:フロントタイヤ力の参照マーカーID。 #3:リアタイヤ力の参照マーカーID。 関数: GET_WHEEL_BASE |
| Brake bias | 入力:ブレーキバイアス(フロント) | - |
| Driver sprocket rad. | 入力:スプロケット半径(フロント) | - |
| Driven sprocket rad. | 入力:スプロケット半径(リア) | - |
| Anti-dive | アンチダイブを測定する | USER(100,
{sa_antidive_input.idstring}) 引数: #1:ブランチID。デフォルト = 100。 #2:アンチダイブを計算するために必要な入力を格納するソルバー配列。 関数: GET_ANTI_DIVE |
| Anti-squat | アンチスクワットを測定する | USER(100,
{sa_antisquat_input.idstring}) 引数: #1:ブランチID。デフォルト = 100。 #2:アンチスクワットを計算するために必要な入力を格納するソルバー配列。 関数: GET_ANTI_SQUAT |
- CG Height
- Caster
- Wheel base
- Anti-dive
- Anti-squat