MV-1028:点-可変形サーフェス高次ペア拘束のモデル化
チュートリアルレベル:上級 本チュートリアルでは、PTdSF(点-可変形サーフェス)ジョイントをモデル化する方法について学習します。
ポイントの作成
このステップでは、PTdSFモデルにポイントを作成します。
- 新しいMotionViewセッションを開始します。
-
以下のいずれかの方法で、Add Point or PointPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Point)アイコンを右クリックします。
(Point)アイコンを右クリックします。
- LabelにBallCMと入力します。デフォルトの識別子を受諾します。
- OKをクリックします。
- タブをクリックし、X、Y、Z座標値を0.0と指定します。
-
表 1に指定したポイントについて、手順2から5までを繰り返します。
表 1. Point X Y Z PointMembInterface39 -55.0 -55.0 0.0 PointMembInterface40 55.0 -55.0 0.0 PointMembInterface41 55.0 55.0 0.0 PointMembInterface42 -55.0 55.0 0.0
ボディの作成
このステップでは、PTdSFモデルに膜とボールのボディを作成します。
-
以下のいずれかの方法で、Add Body or BodyPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Body)アイコンを右クリックします。
(Body)アイコンを右クリックします。
-
ダイアログで、LabelにMembraneと入力します。デフォルトの変数名を受諾し、OKをクリックします。
注: 本チュートリアルにおいてこれ以降、残りの変数についてはすべてデフォルトの名称を受諾します。
- PropertiesタブでFlex Body (CMS)チェックボックスをクリックします。
-
 (Graphic fileブラウザ)アイコンをクリックし、作業ディレクトリ<working
directory>からmembrane.h3dを選択します。
(Graphic fileブラウザ)アイコンをクリックし、作業ディレクトリ<working
directory>からmembrane.h3dを選択します。
- ステップ1を繰り返します。ダイアログで、LabelにBallと入力します。
-
Propertiesタブで、表 2に与えられている情報を指定します。
表 2. Mass Ixx Iyy Izz Ixy Iyz Izx 1 4000.0 4000.0 4000.0 0.0 0.0 0.0 - CM ConnectivityタブでUse center of mass coordinate systemチェックボックスをクリックします。
-
 をダブルクリックします。
をダブルクリックします。
- Select a Pointダイアログで、BallCMを選択し、OKをクリックします。軸のプロパティについては、デフォルトの設定を受諾します。
- Initial ConditionsタブでTranslational velocityの下のVxとVyボックスにチェックマークを入れます。
- それぞれのテキスト欄に、値1を入力します。
マーカーと可変形サーフェスの作成
このステップでは、膜に必要なマーカーを定義します。
-
generalツールバーでをクリックします。
図 1. 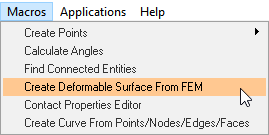
-
パネル内で、
 をダブルクリックします。
をダブルクリックします。
- ダイアログでMembraneを選択し、OKをクリックします。
-
 をダブルクリックします。
をダブルクリックします。
- ダイアログでModelを選択し、OKをクリックします。
-
続いてFEMファイルを選択するために、(ファイルブラウザ)アイコンをクリックします。
-
作業ディレクトリからmembrane.femファイルを選択し、をクリックします。
図 2. 
- Generate Surfaceをクリックします。
ジョイントの作成
このステップでは、膜とグラウンドとの間の4つの固定ジョイントを定義します。
-
以下のいずれかの方法で、Add Joint or JointPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Constraintsツールバーで、
 (Joints)アイコンを右クリックします。
(Joints)アイコンを右クリックします。
- ダイアログで、LabelにJoint 1と入力します。
- TypeにFixed Jointを選択し、OKをクリックします。
-
Jointパネル内で、Connectivityタブを設定します。
-
 をダブルクリックします。
をダブルクリックします。
- ダイアログでMembraneを選択し、OKをクリックします。
-
 をダブルクリックします。
をダブルクリックします。
- ダイアログでGround Bodyを選択し、OKをクリックします。
-
をダブルクリックします。
- ダイアログでPointMembInterface39を選択し、OKをクリックします。
-
-
表 3に指定したスペックを使用し、手順1から4までを繰り返します。
表 3. Label ジョイントタイプ Body 1 Body 2 Point Joint 2 固定ジョイント Membrane Ground Body PointMembInterface40 Joint 3 固定ジョイント Membrane Ground Body PointMembInterface41 Joint 4 固定ジョイント Membrane Ground Body PointMembInterface42
PTdSFジョイントの作成
このステップでは、アドバンストジョイントとしてPTdSF(点-可変形サーフェス)ジョイントを定義します。
-
以下のいずれかの方法で、Add AdvJointダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Constraintツールバーで、
 (Advanced Joint)アイコンを右クリックします。
(Advanced Joint)アイコンを右クリックします。
- ダイアログで、LabelにAdvancedJoint 0と入力します。デフォルトの識別子を受諾します。
- TypeドロップダウンメニューからPointToDeformableSurface Jointをクリックします。
- OKをクリックします。
-
パネル内で、Connectivityタブを設定します。
-
をダブルクリックし、Ballを選択します。
- OKをクリックします。
-
にBallCMを選択し、OKをクリックします。
-
 にDeformableSurface
1を選択し、OKをクリックします。
にDeformableSurface
1を選択し、OKをクリックします。
-
グラフィックスの作成
このステップでは、ボールにグラフィックを作成します。
-
以下のいずれかの方法で、Add Graphics or GraphicPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Graphics)アイコンを右クリックします。
(Graphics)アイコンを右クリックします。
- ダイアログで、LabelにBallと入力します。
- TypeドロップダウンメニューからSphereを選択します。続いて、OKをクリックします。
-
Connectivityタブで、をダブルクリックします。
- ダイアログでBallを選択し、OKをクリックします。
-
をダブルクリックします。
- ダイアログでBallCMを選択し、OKをクリックします。
- Propertiesタブで、Radiusの下に1.0と入力します。
- Visualizationタブで、グラフィックの色を選択します。
節点の検索
このステップでは、Bodies Panelに戻り、膜上の節点を探します。
- Project Browserで、Membraneボディをクリックします。
-
Referenceツールバーで、(Bodies)アイコンをクリックします。
- パネルで、Nodesボタンをクリックします。
- Nodesダイアログで、Only search interface nodesボックスを非選択にします。
- Find Allボタンをクリックします。
-
ダイアログを閉じます。
モデルは、図 3で示すとおりになるはずです。
図 3. 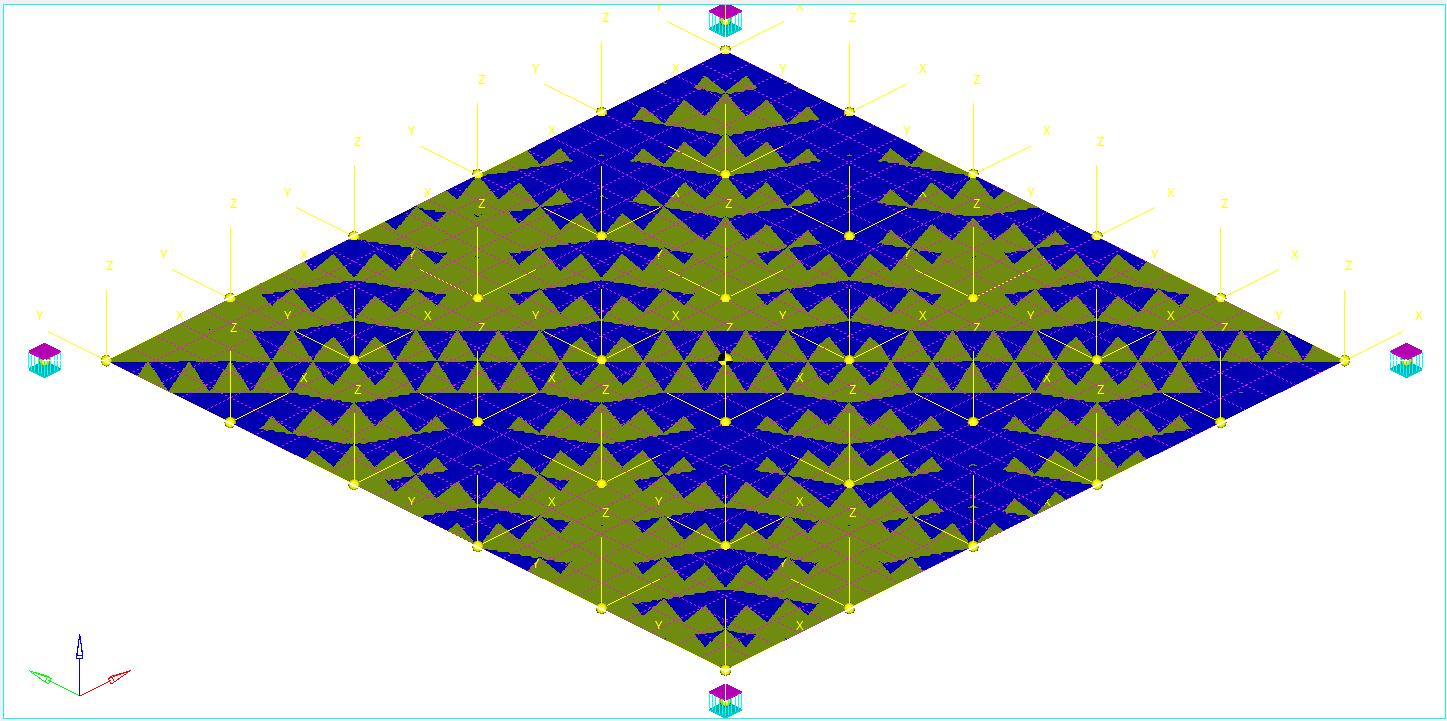
モデルの実行
このステップでは、PTdSFジョイントの制約を伴うモデルを実行します。
重要: この種の拘束は、接触のポイントがカーブについて指定されたデータ範囲内に留まるとは限りません。この要件を満たすためには、端部における追加の力をユーザーが定義する必要があります。接触ポイントがこのサーフェスについて指定されたデータ範囲に収まっていない場合、(これを満足するよう追加のフォースが定義されない限り)ソルバーはエラーを発します。そのような場合は、ボールの初期速度を変更するか、もしくはサーフェスについて指定されたデータ範囲を大きくする、もしくは、より短いタイムインターバルでシミュレーションを実行する必要があります。
-
ツールバーで、
 (Run)をクリックします。
(Run)をクリックします。
-
Runパネルで、図 4にリストされている値を指定します。
図 4. 
- Save and run current modelラジオボタンをクリックします。
-
 (ブラウザアイコン)をクリックし、ファイル名をresult.xmlと指定します。
(ブラウザアイコン)をクリックし、ファイル名をresult.xmlと指定します。
- Saveをクリックします。
- Simulation Settingsボタンをクリックします。
- Simulation Settingsダイアログ内で、Transientタブをクリックします。
-
Maximum step sizeを0.001に指定します(ソリューションはデフォルトのステップサイズである0.01では収束しないため)。
図 5. 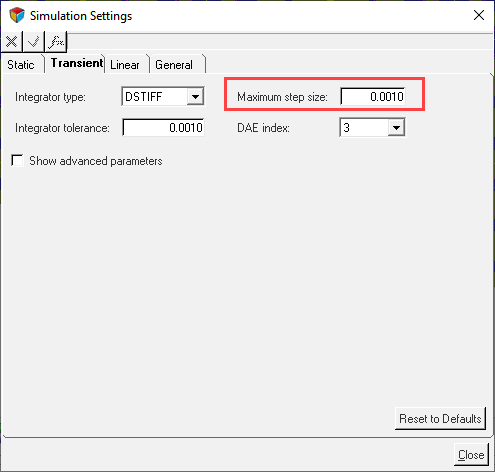
- Closeをクリックします。
-
 (Check Model)ボタンをクリックし、モデルのエラーを確認します。
(Check Model)ボタンをクリックし、モデルのエラーを確認します。
- ソルバーを起動するために、Runボタンをクリックします。
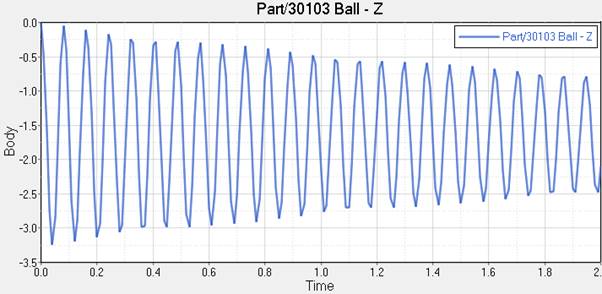
結果の表示
このステップでは、アニメーションを確認し、ボールの重心のZ位置をプロットします。
-
ソルバーがジョブを完了すると、Animateボタンがアクティブになります。Animateをクリックします。
 (Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。膜とボールの変位のプロファイルにも注目する必要があります。そのためには、ボールの重心のZ位置をプロットします。
-
 (Add Page)アイコンをクリックします。
(Add Page)アイコンをクリックします。
-
アプリケーション選択ドロップダウンメニューを使って、クライアントをMotionView
 からHyperGraph 2D
からHyperGraph 2D  に切り替えます。
に切り替えます。
-
Curvesツールバーから
 (Build Plotsl)アイコンをクリックします。
(Build Plotsl)アイコンをクリックします。
-
(ブラウザアイコン)をクリックし、results.abfファイルを読み込みます。
-
Plotパネルを図 6に示すとおり設定します。
図 6. 
-
Applyをクリックします。
Z変位のプロファイルは、図 7に示すようになっているはずです。
図 7.