
Markers
Markersツールを使用して座標系と参照フレームを作成します。
マーカーエンティティは、MotionViewにおける直交右手座標系および参照フレームです。マーカーはマルチボディシステムの主要なエンティティで、マルチボディシステムを構成するすべてのエンティティを表現するためにソルバーで使用されます。
MotionSolveなどのソルバーでは、ジョイントやブッシュなどのエンティティを定義するためにマーカーを使用します。マーカーは慣性の参照座標系を定義するためにも使われます。MotionViewで作成されたこのエンティティには、暗黙的マーカーと呼ばれるマーカーが組み込まれています。マーカーは明示的に作成することもでき、ForcesやOutputsなどのエンティティで参照マーカーとして使用したり、ソルバー関数で使用したりすることができます。
注: グローバル原点でGround Body(Newtonian参照系)に属するマーカー(Global
Frame)は、グローバルデフォルトの一部として利用できます。
マーカーはボディに属する必要があります。ボディは、剛体、弾性体、ポイント質量のいずれのタイプでもかまいません。
マーカーの作成
- Parent Body
- Origin Point
- Orientation
Geometry(ジオメトリ) リボンのMakersツールセットを使って、以下の方法でマーカーを作成します:
- ブラウザで、マーカーの追加先とするシステムを選択します。
-
Geometry(ジオメトリ) リボンから、Markersツールセット をクリックして、マーカーの作成/編集コンテキストを呼び出します。
Markers ガイドバーが表示されます (デフォルトではBodyコレクターがアクティブです )。
- オプション:
Create Pairチェックボックスを選択し、ペアエンティティを作成します。
MotionViewで作成されるほとんどのエンティティと同様に、マーカーエンティティはシングルエンティティまたはペアエンティティにすることができます。ペアエンティティは、モデルのZ-X平面を中心として対称になっているモデルの作成に役立ちます。これらのプロパティも、Z-X平面を中心として対称にすることができます(つまり、Yプロパティが鏡面コピーされます)。マーカーが非対称であるか、または対称であるかは、作成したマーカーの編集時に決定または指定することができます。
-
モデリングウィンドウのボディグラフィックをクリックするか、Advancedセレクターを使用して、Bodyコレクターを解決します。
選択したボディが赤色でハイライト表示されます。
-
以下の方法のいずれかを使用してOriginを解決します:
- モデリングウィンドウの既存ポイントをクリックします。
- CADGraphicの位置(エッジコーナー、センター、サーフェスセンター)にカーソルを合わせてクリックします。この場所に新しいポイントが作成されます。
- AltキーでCADGraphicまたはFileGraphicのメッシュをハイライトします。節点にカーソルを合わせてクリックします。この場所に新しいポイントが作成されます。
- Advanced セレクターを使用して、既存のポイントを選択します。
必要な参照がすべて解決されたため、Createボタンが配置されたマイクロダイアログが表示されています。 - マイクロダイアログのCreateボタンをクリックしてマーカーを作成します。
-
Orientationツールを使って向きを変更するには、モデリングウィンドウのマイクロダイアログ上のOrient Markerアイコン
 をクリックします。
をクリックします。
マーカーの編集
-
Markersツールを使用した編集:
-
マーカーが属するボディの編集:
- Bodyコレクターをクリックして、モデリングウィンドウから別のボディを選ぶか、Advanced Selectorアイコ
 (コレクターの隣) を使って、ダイアログに表示されるリストからボディを選択します。
(コレクターの隣) を使って、ダイアログに表示されるリストからボディを選択します。
- Bodyコレクターをクリックして、モデリングウィンドウから別のボディを選ぶか、Advanced Selectorアイコ
-
マーカーの原点の編集:
- Originコレクターをクリックして、モデリングウィンドウから別のポイントを選ぶか、Advanced Selectorアイコン (コレクターの隣) を使用して、ダイアログに表示されるリストからボディを選びます。
- Originコレクターをクリックして、モデリングウィンドウから別のポイントを選ぶか、Advanced Selectorアイコン
-
Orientationツールを使って向きを変更するには、モデリングウィンドウのマイクロダイアログ上のOrient Markerアイコンをクリックします。
-
マーカーが属するボディの編集:
-
エンティティエディターの使用:
- 編集するマーカーを選択します。そのプロパティは、エンティティエディターに一覧表示されます。
-
BodyまたはOriginコレクターをアクティブにして、グラフィックスj画面からそれぞれ別のボディまたはポイントを選ぶか、コレクターの隣にあるアイコンをクリックして、アドバンストセレクターを使います。
- 向きを変更するには、Orientationセクションを使用します。
プロパティ 詳細 General Label エンティティの説明ラベル。 Varname エンティティの変数名。 ID 整数の識別子。 Active エンティティのアクティブ状態(TrueまたはFalse)。False の場合、エンティティは非アクティブです。 Body マーカーが属する親のボディ。 Orientation Point of origin of the marker Orientation Method 方向付けの方法。次の方法を使用できます: 2-Axes "Axis-Plane" メソッドを使用してマーカーを方向付けます。軸の方向と、1軸と2軸によって定義される平面にある別の方向を指定します。 1st Axis Direction X、Y、Z軸で方向を選択します。 Align method 選択した軸を方向に沿って整列させる方法を Point、ector、DxDyDzから選択します。 Pointを選択した場合は、グラフィックス画面またはAdvancedセレクターでポイントを選択します。 Vectorを選択した場合は、グラフィックス画面またはAdvancedセレクターでベクトルを選択します。
DxDyDzを選択した場合は、方向の余弦値を入力します。
2nd Axis Direction プレーンを選択します。選択肢は1軸によって異なります。例: Z-Axisが選択された場合、選択できるのはZX平面とZY平面です。 Align method 選択した面に沿って整列させる方法を Point、ector、DxDyDzから選択します。 Pointを選択した場合は、グラフィックス画面またはAdvancedセレクターでポイントを選択します。 Vectorを選択した場合は、グラフィックス画面またはAdvancedセレクターでベクトルを選択します。
DxDyDzを選択した場合は、方向の余弦値を入力します。
Note & Tags Note 任意の説明文。 Attachment Candidates Systems/Assemblies/Analysesに添付可能なエンティティのタグを追加します。
Orientation
Orientationツールを使用して、エンティティを特定の方向に揃えます。
- Vector
- ジョイント
- ブッシュ
- マーカー
- Gears
以下の2タイプのOrientationツールがあります。
- VectorOrientation
- このツールは、軸またはベクトルの向きを設定します。このツールを使用して、次のエンティティの向きを設定します:
- ベクトル
- 非コンプライアントジョイント
上記エンティティの編集コンテキストで、Orientationツールをクリックします。VectorOrientationツールが表示されます。図 1. 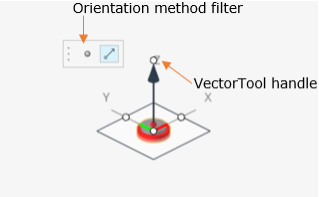
このツールは、方向を示すベクトル矢印と、ベクトル方向に対して垂直な平面で構成されています。矢印の先端には円形のハンドルがあります。このツールには、向き設定方法のフィルターとして使用するPointアイコンとVectorアイコンを含むマイクロダイアログも付随しています。
- MarkerOrientation
- このツールは、軸-平面の手法によって参照フレームの向きを設定し、以下の向きの設定に使用されます:
- マーカー
- ブッシュおよびコンプライアントジョイント
上記エンティティの編集コンテキスト時は、Orientationツールをクリックします。MarkerOrientationツールが表示されます。図 2. 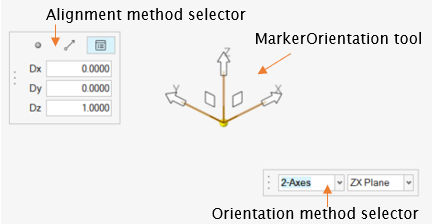
このツールは、3つの方向ベクトルと次の2つのマイクロダイアログで構成されます:- 軸と平面を選択するための軸-平面セレクター。
- 向き設定方法のフィルター(Point、Vector、Direction Cosinesのアイコンが含まれます)。
- 向きを設定するには:
- Orientation method
selectorで1-Axisまたは2-Axesを選択します。
- 1-Axisは、1つの軸のみを使用してエンティティの向きを設定します。残りの軸の向きは自動的に設定されます。
- 2-Axesの方法では、2つの軸の情報を入力して、エンティティの向きを設定します。
- 1つの方向ベクトル(X、Y 、またはZ)をクリックして、向き設定の主軸を選択します。
- 2-Axesを選択した場合、選択したベクトルに関連付けられた平面は、このツールに表示され、軸-平面セレクターにもリストされます。
- Alignment method filterを使用して、ポイントまたはベクトルに軸を揃えるか、方向余弦を使用します。
- ベクトル終端のハンドルを掴んで、回転させます。
- フィルターで選択した向き設定方法に基づいて、ポイント(CAD頂点のポイントエンティティ)またはベクトルにカーソルを合わせます。
- 整列させる目的のエンティティがハイライト表示されたら、マウスを放して、ハイライト表示されたエンティティを選択します。選択した方向に軸が揃えられます。
- 2-Axesを選択した場合は、Planeハンドルをクリックします。ハンドルが選択されます。
- フィルターで選択した向き設定方法に基づいて、ポイント(CAD頂点のポイントエンティティ)またはベクトル(ベクトルエンティティまたはCADエッジ)にカーソルを合わせてクリックします。
- 2つ目の軸は、選択した参照がエンティティの2つの軸によって形成される平面内に配置されるように位置合わせされます。
図 3. 向き設定に使用されるPoint 2を含むマーカーのXZ平面の描画。 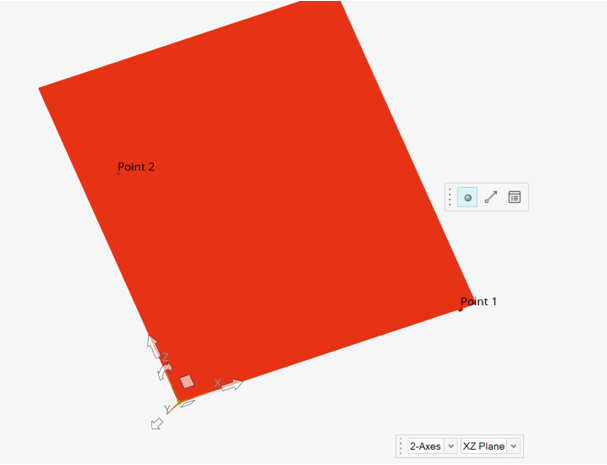
- Orientation method
selectorで1-Axisまたは2-Axesを選択します。