
Couplers
Couplerエンティティは、2つまたは3つのジョイントの自由度の間の代数的関係を定義します。
この拘束要素を使用すると、理想化された平歯車、ラックギアとピニオンギア、およびディファレンシャルギアを、一連のジョイント内の複数の変位を関連付けるシンプルな拘束としてモデル化できます。カプラーは、並進ジョイント、回転ジョイント、および円筒ジョイント間の関係のみの指定に使用できます。
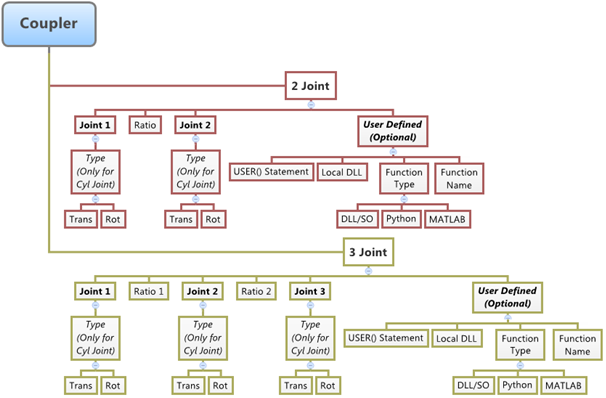
Couplerジョイントを定義するために必要なトポロジ情報を以下の図に示します:図 1.
カプラーの作成
- ブラウザで、カプラーの追加先とするシステムを選択します。
-
Model(モデル)リボンからCouplers(カプラー)アイコンをクリックします。
エンティティ作成用のガイドバーが表示されます。
- オプション:
Pairチェックボックスを選択し、ペアエンティティを作成します。
MotionViewで作成するほとんどのエンティティと同様に、カプラーエンティティはシングルエンティティまたはペアエンティティにすることができます。ペアエンティティは、モデルのZ-X平面を中心として対称になっているモデルの作成に役立ちます。これらのプロパティも、Z-X平面を中心として対称にすることができます(つまり、Yプロパティが鏡面コピーされます)。カプラーの非対称性または対称性は、作成したカプラーの編集時に決まるか、指定できます。
-
拘束するジョイントの数を選択します。
- 2 joints
または
- 3 joints
- 2 joints
-
最初のジョイント参照(Joint 1)を選択します。
- モデリングウィンドウでジョイントを選択します。
または
- ガイドバーで、Advanced
Selector
 をクリックし、 モデルツリーで選択します。
をクリックし、 モデルツリーで選択します。
注: ペアのカプラーを定義する場合はJoint 1、Joint 2などにペアエンティティを使用します。 - モデリングウィンドウでジョイントを選択します。
-
2番目のジョイント参照(Joint 2)を選択します。
- モデリングウィンドウでジョイントを選択します。
または
- ガイドバーで、Advanced
Selector をクリックし、 モデルツリーで選択します。
- モデリングウィンドウでジョイントを選択します。
-
拘束するジョイントの数が3の場合は、3番目のジョイント参照(Joint 3)を選択します。
- モデリングウィンドウでジョイントを選択します。
または
- ガイドバーで、Advanced
Selector をクリックし、 モデルツリーで選択します。
- モデリングウィンドウでジョイントを選択します。
- オプション:
 をクリックすると、エンティティの選択をリセットし、新しいエンティティを選択することができます。
をクリックすると、エンティティの選択をリセットし、新しいエンティティを選択することができます。
-
リファレンス選択が完了したら、以下のいずれかの方法でカプラーを作成します。
- ガイドバーの
 をクリックすると、エンティティが作成され、方向が決まります。
をクリックすると、エンティティが作成され、方向が決まります。または
- モデリングウィンドウのマウス位置に表示される
 ボタンをクリックします。
ボタンをクリックします。または
 をクリックしてエンティティを作成し、このカプラーのガイドバー選択を終了します。
をクリックしてエンティティを作成し、このカプラーのガイドバー選択を終了します。
カプラーをモデルに追加すると、ブラウザ領域にそのカプラーが自動的に表示されます。注: デフォルトで、MotionView内のエンティティの変数名は特定の規則に従います。例えば、すべてのジョイントエンティティの変数名は“c_”で始まります。これは、MotionViewでモデルを構築する場合に従う推奨規則であり、モデル編集やモデル操作において様々なメリットが得られます。 - ガイドバーの
ヒント: 新しいカプラーは、Modelのラベル(または任意のシステム/解析)を右クリックして、 モデルブラウザからを選択、または、Couplers を右クリックし、 Add Couplerを選択して作成します。
カプラーの編集
-
現時点でCouplersパネルが表示されていない場合は、目的のカプラーをモデルブラウザまたはモデリングウィンドウでクリックして選択します。
Couplersパネルが自動的に表示されます。
-
拘束するジョイントの数を選択します。
注: 選択したカプラーがペアエンティティの場合は、まず、パネルでLeftタブとRightタブを区別してから、プロパティを編集します。ペアカプラーを定義する場合は、ジョイントにペアエンティティを使用します。ヒント: カプラープロパティを対称にするにはSymmetric propertiesオプションにチェックマークを入れます。このオプションにチェックマークを入れると、ペアエンティティのどちら側(左または右)の値を使用するかを尋ねるメッセージがMotionViewに表示されます。片側を選択すると、その側の値が“リード”となり、他の側(”フォロワー”)の値はグレイアウトされ、リード側の値に準じます。
- Joint 1コレクターをクリックして、目的のジョイントをモデリングウィンドウで選択するか、同じコレクターをダブルクリックしてモデルツリーを開きます(ここから目的のジョイントを選択できます)。
- 同様に、Joint 2コレクターをクリックして、カプラーの2番目のジョイントを選択します。
-
拘束するジョイントの数を3に設定した場合は、Joint 3コレクターで同じ手順を繰り返します。
注: いずれかのジョイントが円筒形の場合は、パネルで選択したジョイントごとに、その右側にあるドロップダウンメニューを使用して、制御する変位のタイプ(並進または回転)を選択します。
- Propertiesタブをクリックします。
- 2つのジョイントを持つカプラーの場合は、Joint 1の変位とJoint 2の変位との比率を、該当するボックスに入力します。3つのジョイントを持つカプラーの場合は、Joint 1の変位とJoint 2の変位との比率、およびJoint 2の変位とJoint 3の変位との比率を入力します。
カプラーのプロパティ
| プロパティ | 説明 | |
|---|---|---|
| Side | ペアエンティティが定義されている場合、それぞれの側を選択して、プロパティを個別に定義します。 | |
| Symmetry | このオプションを使用して、カプラーが対称かどうか、およびプロパティ定義を担う側を定義します。 | |
| General | ||
| Label | エンティティの説明ラベル。 | |
| Varname | エンティティの変数名。 | |
| ID | 整数の識別子。 | |
| Active | エンティティのアクティブ状態。TrueまたはFalseFalseの場合、エンティティは非アクティブです。 | |
| Use Virtual | これを仮想的な制約にします。* | |
| Type | カプラーのタイプ(2 jointsまたは3 joints)。 | |
| Joint 1 | 1つ目のジョイントを選択します。 | |
| Jt 1 Coupling Axis | 1つ目のジョイントのカップリング軸。これにより、制御される変位のタイプが定義されます。このオプションは自動的に指定されます。円筒ジョイントの場合は、変位のタイプ(並進または回転)を手動で選択する必要があります。 | |
| Joint 2 | 2つ目のジョイントを選択します。 | |
| Jt 2 Coupling Axis | 2つ目のジョイントのカップリング軸。これにより、制御される変位のタイプが定義されます。このオプションは自動的に指定されます。円筒ジョイントの場合は、変位のタイプ(並進または回転)を手動で選択する必要があります。 | |
| Joint 3 | 3つ目のジョイントを選択します(任意選択。このオプションは、Typeが3 jointsの場合にのみアクティブになります)。 | |
| Jt 3 Coupling Axis | 3つ目のジョイントのカップリング軸(このオプションは、Typeが3 jointsの場合にのみアクティブになります)。これにより、制御される変位のタイプが定義されます。このオプションは自動的に指定されます。円筒ジョイントの場合は、変位のタイプ(並進または回転)を手動で選択する必要があります。 | |
| Properties | ||
| Ratio 1 | joint 1の変位とjoint 2の変位との比率。 | |
| Ratio 2 | joint 2の変位とjoint 3の変位との比率(このオプションは、Typeが3 jointsの場合にアクティブになります)。 | |
| User-defined | このチェックボックスをアクティブにすると、ユーザーサブルーチンを使用してカプラーのプロパティを指定できます。 | |
| User expr | ユーザーサブルーチンに渡されるパラメータを含むUSERソルバー関数を用いて定義される式。 | |
| Use local file and function name | このチェックボックスをアクティブにすると、ファイルを通じてプロパティを定義できます。 | |
| Local file | サブルーチンのローカルファイルを選択します。 | |
| Function Type | 関数タイプを選択します。 | |
| Function name | 関数名を定義します。 | |
| Note & Tags | ||
| Note | 任意の説明文。 | |
| Attachment Candidates | Systems/Assemblies/Analysesに添付可能な、エンティティのタグを追加します。 | |
*制約が仮想制約か通常制約かを定義します。Use Virtualチェックボックスを選択した場合、制約は仮想制約として実装されます。そうでなければ、制約は通常の代数制約として実装されます。仮想ジョイントの詳細については、Constraint: Jointのコメント17../../../../hwsolvers/ms/topics/solvers/ms/xml-format_41.htmをご参照ください。
カプラーに対するユーザー定義プロパティの使用
必要に応じて、User-Definedタブを使用してカプラーを定義します。これにより、ユーザーサブルーチンを使用してカプラーのプロパティを指定できます。
-
ConnectivityタブでUser-defined
propertiesチェックボックスをクリックします。
Propertiesタブが除去されます。
- 新たに追加されたUser-Definedタブをクリックします。
-
ユーザーサブルーチンを定義します。