
接触の編集
接触プロパティは、エンティティエディターを使用して編集できます。接触に対するグラフィックスの適合性をチェックすることもできます。
注: 特定のプロパティは、接触を選択し、ModelリボンでContactsツールをクリックすることで、マイクロダイアログを使用して編集することもできます。
Contact Properties
| プロパティ | 説明 | |||
|---|---|---|---|---|
| General | ||||
| Label | エンティティの説明ラベル。 | |||
| Varname | エンティティの変数名。 | |||
| ID | 整数の識別子。 | |||
| Active | エンティティのアクティブ状態。TrueまたはFalseFalseの場合、エンティティは非アクティブです。 | |||
| Type | 接触のタイプ。3Dまたは2DのRigid To Rigid、またはPoint to Deformable Surface。エンティティが作成されると、このプロパティは読み取り専用になります。 | |||
| 3D | 接触タイプは3Dです。IタイプとJタイプの以下の組み合わせが提供されています。 | |||
| I Type | I(1つ目)側の接触ペアのタイプ。Body、Deformable Curve、またはDeformable Surface。 | |||
| I Body | I TypeがBodyの場合、接触ペアの1つ目のボディのボディ参照を選択します。 | |||
| I Deformable Curve Graphic | I TypeがDeformable Curveの場合、接触ペアの1つ目の参照として可変形カーブグラフィックを選択します。 | |||
| I Deformable Surface Graphic | I TypeがDeformable Surfaceの場合、接触ペアの1つ目の参照として可変形サーフェスグラフィックを選択します。 | |||
| J Type | J(2つ目)側の接触ペアのタイプ。Body、Deformable Curve、またはDeformable Surface。 | |||
| J Body | J TypeがBodyの場合、接触ペアの2つ目のボディのボディ参照を選択します。 | |||
| J Deformable Curve Graphic | J TypeがDeformable Curveの場合、接触ペアの2つ目の参照として可変形カーブグラフィックを選択します。 | |||
| J Deformable Surface Graphic | J TypeがDeformable Surfaceの場合、接触ペアの2つ目の参照として可変形サーフェスグラフィックを選択します。 | |||
| Graphics | GraphicsをクリックしてContact Graphicsダイアログにアクセスし、接触に関与するIグラフィックとJグラフィックを選択します。剛体との接触では、複数のグラフィックを選択できます。デフォルトでは、そのボディに属しているすべてのグラフィックが選択されます。下記のコメントをご参照ください。 | |||
| Highlight contact side | グラフィックの接触している側を表示します。 | |||
| Mesh errors/No mesh errors | これらのグラフィックのいずれかにオープンエッジまたはT接合が含まれている場合、メッシュエラーがアクティブになります。このオプションをクリックすると、メッシュエラーがハイライト表示されます。 | |||
| 2D Rigid To Rigid | 接触は、同じ2D平面内の異なるボディに属している2つのジオメトリックカーブ間で生じます。 | |||
| I Body | 接触ペアの1つ目のボディのボディ参照を選択します。 | |||
| J Body | 接触ペアの2つ目のボディのボディ参照を選択します。 | |||
| Graphics | GraphicsをクリックしてContact Graphicsダイアログにアクセスし、接触に関与するIグラフィックとJグラフィックを選択します。デフォルトでは、そのボディに属しているすべてのカーブグラフィックが選択されます。Flip Contact side - 下記のコメントをご参照ください。 | |||
| Point to Deformable Surface | 接触は、選択されたポイントを中心とする球体として表現されたボディと、可変形サーフェスの間で生じます。 | |||
| I Body | 接触ペアの1つ目のボディのボディ参照を選択します。 | |||
| Origin | I Body上に表される球体の中心点を選択します。 | |||
| Deformable Surface | 接触ペアの可変形サーフェスを選択します。 | |||
| Properties | ||||
| Normal Force | 接触の法線方向の力計算のプロパティを設定します。 | |||
| Type | 垂直力計算の方法を選択します。 | |||
| Impact | 力計算にImpact法を使用します。3Dまたは2Dの剛体間接触に適用できます。 | |||
| Stiffness | 境界サーフェスの相互作用の剛性値を入力します(正の実数)。 | |||
| Exponent | 接触面のフォース対貫通深さ特性で見た貫通深さの指数の値を入力します。 剛性スプリング特性については1.0以上、軟性スプリング特性については1.0未満でなくてはなりません。 Exponent > 0 |
|||
| Damping | 最大減衰係数の値(> 0.0)を入力します。 | |||
| Penetration Depth | 完全減衰が適用される最小貫通深さの値(> 0.0)を入力します。 | |||
| Poisson | 力計算にPoisson法を使用します。すべてのタイプの接触に適用できます。 | |||
| Radius | 可変形サーフェスが接触するボディ上に表された球体の半径値を入力します(ポイントと可変形サーフェスの接触にのみ適用できます)。 | |||
| Penalty | 材料間のローカル剛性を決定するPenaltyパラメータの値を入力します。大きい値を使用すると、2つのボディ間の貫通が少なくなります。 | |||
| Restitution coefficient | Restitution係数の値を入力します。この値は、2つの接触体間のエネルギー損失を表します。この値の有効な範囲は0.0~1.0です。値1.0はエネルギー損失がなく、完全な弾性接触であることを示します。値0.0は完全な塑性接触で、すべてのエネルギーは接触中に消散されることを表わします。 | |||
| Normal transition velocity | 完全減衰が適用される速度の値を入力します(ポイントと可変形サーフェスの接触には適用できません)。 | |||
| Volume Model | 力計算にVolume法を使用します。3Dまたは2Dの剛体間接触に適用できます。 | |||
| Bulk Modulus | 体積弾性係数値を入力します。>0.0。物質のbulk modulus(体積弾性係数)は、一様圧縮への物質の抵抗を評価します。これは、結果の体積のrelative(相対)現象に対する無限小圧力増加の比として定義されます。 | |||
| Shear Modulus | せん断係数の値を入力します。> 0.0 せん断係数(剛性係数)は、せん断ひずみに対するせん断応力の比率です。 |
|||
| Layer depth | 材料の深さの値を入力します。 >0.0 | |||
| Exponent | フォース変形特性の指数の値を入力します。> 0.0 | |||
| Damping | 減衰係数の値を入力します。> 0.0 | |||
| Linear | 接触力用に線形スプリングダンパモデルを使用します。ポイントと可変形サーフェス接触にのみ適用できます。 | |||
| Radius | 可変形サーフェスが接触するボディ上に表された球体の半径値を入力します。 | |||
| Stiffness | 接触力の剛性の値を入力します。> 0.0 | |||
| Damping | 接触力の減衰の値を入力します。> 0.0 | |||
| User defined | 垂直力と摩擦力の計算用にユーザー定義の定式化を使用します。すべてのタイプの接触に適用できます。 | |||
| Radius | 可変形サーフェスが接触するボディ上に表された球体の半径値を入力します(ポイントと可変形サーフェスの接触にのみ適用できます)。 | |||
| User expr | ユーザー式(引数を伴うサブルーチンに対するUSER()呼び出し)を指定します。 | |||
| Use local file and function name | 省略可能です。サブルーチンのローカルファイルと関数を指定します。 | |||
| Local file | Function typeに基づいてサブルーチンのファイルを選択します。 | |||
| Function type | ファイルのタイプを選択します。DLL、Python、MATLAB、Composeのいずれかを選択します。 | |||
| Function Name | 呼び出す必要のあるサブルーチンファイル内の関数の名前。 | |||
|
注: ローカルファイルとファイル名が使用されていない場合、ソルバーはデフォルトの検索基準に基づいてサブルーチンを使用することがあります。詳細については、ソルバーのリファレンスガイドをご参照ください。
|
||||
| Friction Force | 接触の接線方向の力計算のプロパティを設定します。 | |||
| Type | 摩擦力計算の設定のタイプを選択します。 | |||
| Disabled | 摩擦は無効です。 | |||
| Dynamic Only | 動摩擦(滑り摩擦)のみが摩擦計算で考慮されます。静的摩擦と滑りへの過渡状態は無視されます。 | |||
| Static & Dynamic | 3つの摩擦状態(静的摩擦、滑り摩擦への過渡状態、滑り摩擦)のそれぞれが発生する期間が摩擦計算で考慮されます。 | |||
| MU Static | 静止しているボディが動き出すために超える必要がある静摩擦係数の値を入力します。>0.0(Dynamic Onlyには適用されません) | |||
| Mu Dynamic | 動いているボディに発生する動摩擦係数を入力します。> 0.0 および < MU Static。 | |||
| Stiction Transition velocity | 摩擦係数がMU Staticの値になるため下回る必要がある速度を入力します。滑り速度が静摩擦遷移速度と摩擦遷移速度との間である際、摩擦係数はその2つの間の過渡状態にあります。>0.0(Dynamic Onlyには適用されません) | |||
| Friction Transition velocity | 摩擦係数がMU Dynamicの値になるために上回る必要がある速度を入力します。滑り速度が静摩擦遷移速度と摩擦遷移速度との間である際、摩擦係数はその2つの間の過渡状態にあります。>静摩擦遷移速度 | |||
| Advanced | ||||
| Find precise contact event | 接触の最初のイベントを正確に捕捉するようソルバーに指示するには、このオプションを選択します。 | |||
| Max. Step size scale factor | 正確な接触をキャプチャーするために積分器が使用する最大ステップサイズのスケールファクター。 | |||
| Change simulation max step size | 接触が検知された後に、そのシミュレーションについて最大ステップサイズを変更するには、このオプションを選択しします。 | |||
| New max step size | 新しい最大ステップサイズ値。 | |||
| Force computed at | 力が計算されるメッシュの位置を選択します。 | |||
| Element Center | MotionSolveの接触検知と力計算は、メッシュ要素中心の貫通に基づきます。これがデフォルト値です。 | |||
| Nodes | MotionSolveの接触検知と力計算は、メッシュ節点の貫通に基づきます。 | |||
| Note & Tags | ||||
| Note | 任意の説明文。 | |||
| Attachment Candidates | Systems/Assemblies/Analysesに添付可能な、エンティティのタグを追加します。 | |||
注:
- グラフィックのMaterial Insideオプションは、そのグラフィックの閉じたボリューム内に材料があることを示します。したがって、そのジオメトリのサーフェス法線はグラフィックサーフェスの外側を向きます。このオプションがオフになっている場合は、ジオメトリのサーフェス法線は内側を向きます。このフラグは、内部接触をシミュレートするためにサーフェス法線を反転させるのに役立ちます。
- メッシュの法線は、接触の方向を指していなければなりません。法線の向きがビューアーを指しているように見える際、サーフェスメッシュの側は、接触の側です。反対方向から見ている場合、それは材料側と呼ばれます。正しい接触の方向を設定するには、エンティティエディター内のMaterial InsideおよびHighlight contact sideオプションを使用します。以下は、Material InsideおよびHighlight contact sideオプションがどのように働くかの例です:
図 1. 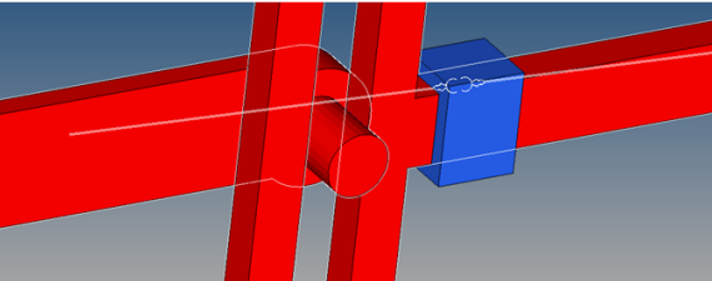
- 両方のグラフィックスでMaterial Insideオプションをアクティブにしている場合、Highlight contact sideオプションにチェックマークを入れると、グラフィックスの外側から見たときにこれら両方のグラフィックスが赤色で表示されます。
- メッシュの法線は、接触の方向を指していなければなりません。法線の向きがビューアーを指しているように見える際、サーフェスメッシュの側は、接触の側です。反対方向から見ている場合、それは材料側と呼ばれます。正しい接触の方向を設定するには、エンティティエディター内のMaterial InsideおよびHighlight contact sideオプションを使用します。以下は、Material InsideおよびHighlight contact sideオプションがどのように働くかの例です:
- 2Dの剛体間接触の場合は、Material Insideの代わりにFlip Contact sideを使用できます。
- Flip Contact Sideをクリックして、接触するカーブグラフィックの側部を指定します。矢印で指されるカーブの側は、その接触する側を示しています。このフラグを変更すると、接触の方向が逆になります。
- 接触に関与するカーブの平坦性をチェックするには、Contact GraphicsダイアログでIdentify Planarityを選択します。このツールでは、Body Iで基準として最初に選択したグラフィックを考慮しながら、各カーブが平坦かどうかと、カーブどうしが同一平面上にあるかどうかがチェックされます。
- 接触に関連する個々のグラフィックスは、閉じたボリュームを形成する必要があります。すなわち、グラフィックメッシュには、オープンエッジやT接合が含まれていてはいけません。オープンエッジやT接合をチェックするには、Highlight mesh errorsオプションを使用します。オープンエッジは赤いラインで、T接合は青いラインでハイライト表示されます。視認性を高めるには、関連するグラフィックコンポーネントの描写を影なしモードに切り替えます。注: メッシュエラーが検出されなかった場合は、このオプションが無効になり、No mesh errorsが表示されます。
図 2. 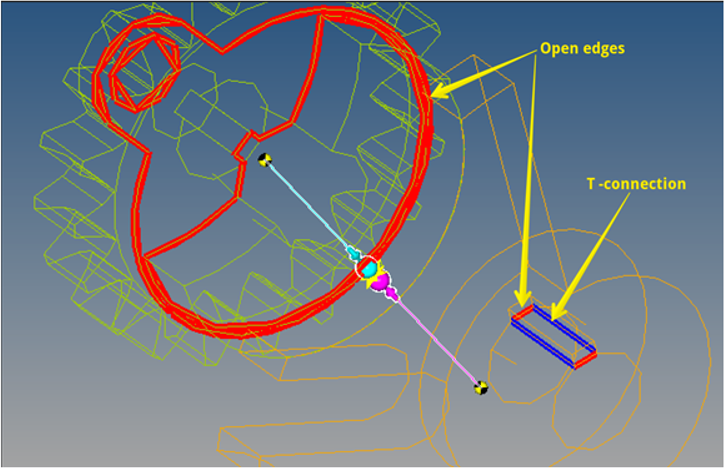
- Find precise contact eventをアクティブにすると、MotionSolveソルバーデックにセンサーエンティティが自動的に導入され、接触力関数が追跡されます。
- 正の接触力によりセンサーが始動すると、ソルバーは成功した最後のステップをリジェクトし、変更された最大ステップサイズで1つ前のステップサイズから進みます。変更された最大ステップサイズ(現在の最大ステップサイズ) * (最大ステップサイズの係数)として計算されます。
- Change simulation max step sizeをアクティブにすると、以降のシミュレーションで最大ステップサイズを変更できるようになります。
- 上記のオプションは共に、接触シミュレーションにおいて精度とロバスト性を向上させますが、シミュレーション時間は長くなります。したがって、これらのオプションは必要な場合にのみ選択的に使用することが推奨されます。
Note on 2D Contacts
注:
- 2次元接触に関連した個々のカーブグラフィックスは、平面のカーブのみを使用していなければなりません。平面のカーブは、そのデータポイントをすべて単一の平面内に有します。
- 現時点で、MotionViewでは、2D接触に使用可能なカーブグラフィックスの作成で、3Dデカルト / パラメトリックカーブのみをサポートしています。以下は、Highlight
contact sideオプションがどのように働くかの例です:
図 3. 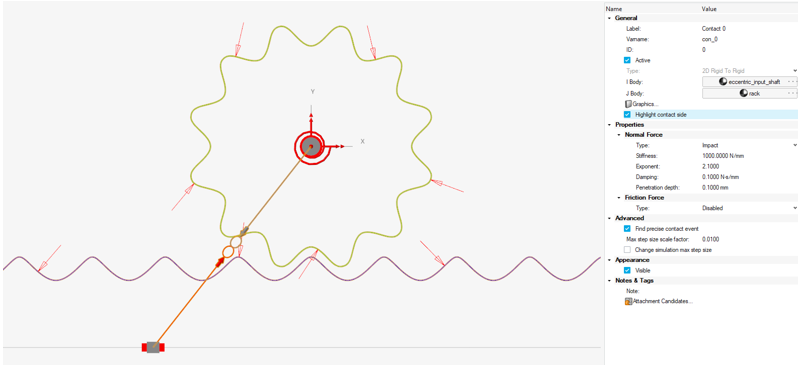
上の例は、カーブ群とそれらの間に定義された2次元接触を含んだラックとピニオンを示しています。矢印が指している(外側の)ピニオンの側は、接触する可能性がある側を示しています。同様に、ピニオンカーブ上の矢印は、外側からそれを指している矢印群を有しています。
外側から接触する可能性がある場合、Flip Contact Sideオプションを使用することができます。